开发者指南
本指南面向希望在傅里叶机器人上使用 Fourier Aurora SDK 开发自己的应用程序的开发者。它根据您项目的需求,提供了如何使用 SDK 的信息。
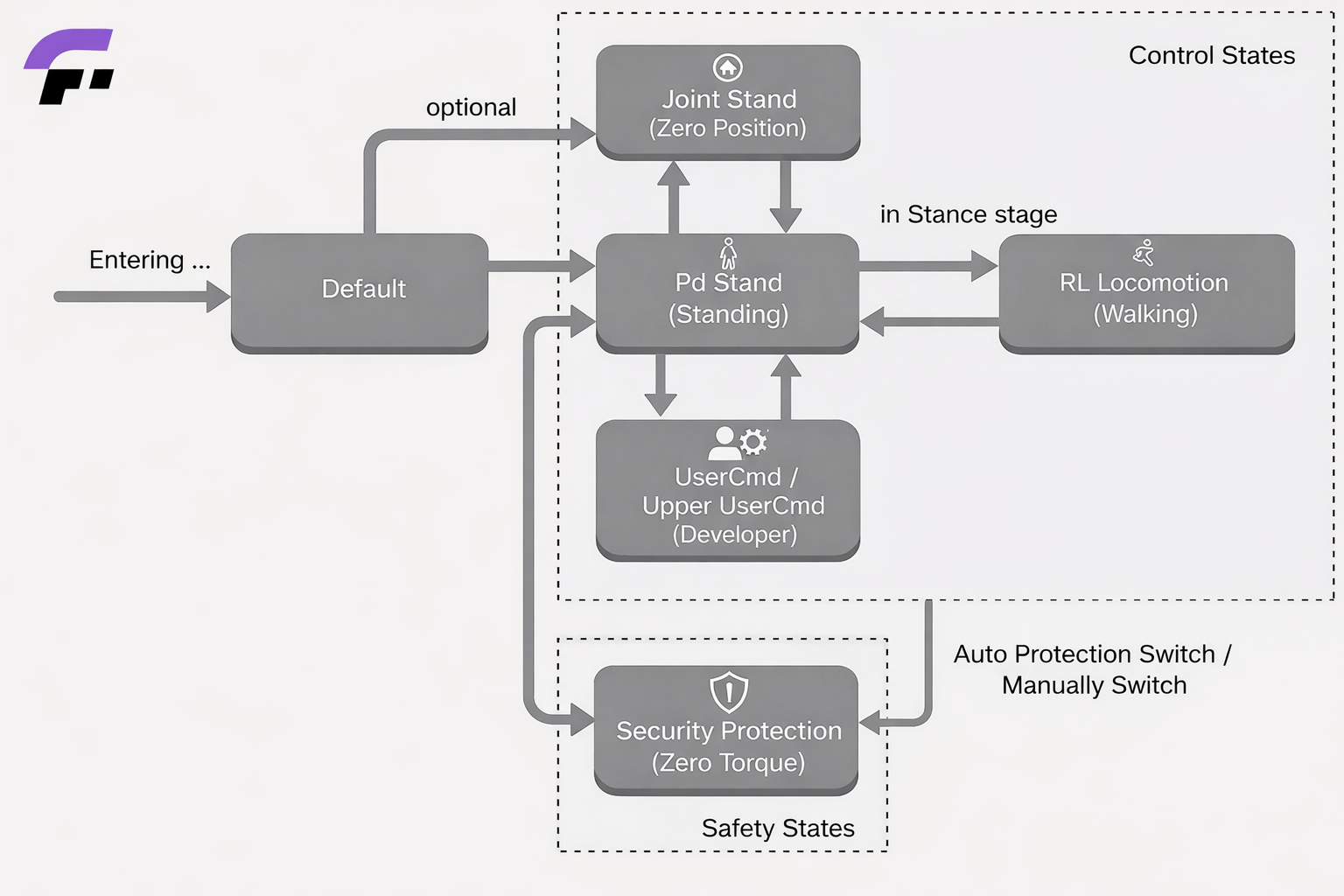
Aurora 运行一个 FSM 状态机,每个状态对应特定的任务(控制器)。您可以使用手柄或通过 DDS 接口发送命令在这些状态之间切换。每个任务都有自己的输入和输出。您可以使用手柄或 DDS 与任务交互。
状态和任务概览
Aurora 原生提供各种控制器,每个控制器由一个任务运行。控制器不能直接调用。相反,它们被封装在单独的状态中,这确保了控制器不会重叠。
| 状态名称 | 手柄映射 | DDS 映射 | 链接 |
|---|---|---|---|
| Default | LB+RB | 0 | 默认状态 |
| Security Protection | LT+RT | 9 | 安全保护状态 |
| Joint Stand | LB+A | 1 | 关节直立状态 |
| PdStand | LB+B | 2 | Pd站立状态 |
| RL Locomotion | RB+A | 3 | RL行走状态 |
| UserCmd | 无 | 10 | 用户指令状态 |
| Upper UserCmd | 无 | 11 | 上身用户指令状态 |
每个状态的状态明细格式相同。以下是状态明细中术语的解释。
- State Name(状态名称): 状态的名称。
- Task Name(任务名称): 任务的名称,通常指控制器。
- Joystick mapping(手柄映射): 使用手柄切换到该状态的组合键。
- DDS mapping(DDS 映射): 用于通过 DDS 消息或客户端切换到该状态的 DDS 映射值。
- Frequency(频率): 该状态下控制器的默认频率。
- Avaliable for hanging(可用于悬挂): 某些控制器(主要是基于强化学习的控制器)在脚离地时可能表现危险。本节指示该状态下的控制器是否适合悬挂。
- Avaliable for standing(可用于站立): 本节指示该状态下的控制器是否能够独立站立。
- Auto Protection Switch(自动保护切换): 某些控制器带有自动保护切换机制。当它们发现自己超出可控范围时,它们将自动切换到安全保护状态。本节指示该状态下的控制器是否带有自动保护切换机制。
Fourier Aurora Client
Fourier Aurora Client 是 Aurora 的 Python 客户端。它允许您通过 DDS 中间件与 Aurora API 交互,从而在 Aurora 平台上检索数据和执行操作。Aurora 客户端可以安装在机器人胸部计算机或任何其他设备上,以与 Aurora 服务器通信。
有关 fourier aurora client 的安装,请参阅安装教程
客户端使用
在使用 fourier aurora client 之前,请确保 Aurora 已启动。要初始化 fourier aurora client,请使用 get_instance 函数。domain_id 和 robot_name 参数是与 Aurora 连接的必需参数。对于 fouriern1,domain_id 默认设置为 123,robot_name 应为 "fouriern1"。namespace 和 is_ros_compatible 选项保留供将来使用。
在代码结束时,请使用 close 函数对客户端进行清理。
from fourier_aurora_client import AuroraClient
client = AuroraClient.get_instance(domain_id=123, robot_name="fouriern1", namespace=None, is_ros_compatible=False)
# 在此处执行内容 ...
client.close()
状态切换接口
Aurora 中的每个控制器状态由一个 DDS 映射值映射,该值可以在上表中找到。开发者可以使用 fourier aurora client 中的 set_fsm_state 函数在这些状态之间切换并获取当前运行状态。
client.set_fsm_state(2) # 切换到 pdstand 状态
state = client.get_fsm_state() # 获取当前状态的 DDS 映射值
对于 Rl locomotion 状态,其上身控制器由上身状态管理器管理。可以通过 set_upper_fsm_state 函数进行切换。
client.set_upper_fsm_state(1) # 切换到 upper act 状态(摆臂)
state = client.get_upper_fsm_state() # 获取当前上身状态的 DDS 映射值
Aurora 使用速度源值来确保只有一个设备控制机器人的速度。在发送速度命令之前,使用 set_velocity_source 切换速度源。
client.set_velocity_source(2) # 切换到客户端控制
client.get_velocity_source() # 获取当前速度源
控制接口
Fourier Aurora Client 提供的控制接口主要分为两大类:机器人控制信息获取接口与控制命令发送接口。
机器人控制信息获取接口用于读取机器人当前的运行状态与控制相关数据,包括但不限于关节角度、基座速度等关键运动信息。该类接口在机器人所有运行状态下均可使用,用于状态监测、控制反馈获取以及上层算法决策支持。我们提供了完整的机器人信息获取示例程序,用户可参考机器人信息获取案例
控制命令发送接口用于向机器人下发控制指令,实现对机器人运动行为的直接控制。需要注意的是,不同的机器人运行状态对应的控制指令接口存在差异。用户在发送控制命令前,应确保机器人处于与指令类型相匹配的状态,具体的接口说明和使用约束可参考各运行状态对应的参考文档状态和任务概览。
关于 Fourier Aurora Client 提供的全部接口说明,详见API文档。