关于GR3
GR-3是傅利叶首款专为交互陪伴打造的"Care-bot"人形机器人,以"亲和"、"安全"、"情感交互"为核心。GR-3身高165cm,体重71kg,全身覆盖55个自由度,单手负载可达3公斤,支持更拟人化的肢体表达。其通过柔和配色、柔性覆材、以及适中身高比例,营造出轻松、可亲近的整体形象,从视觉上弱化机械感,消解传统机器人的冰冷感。同时GR-3搭载了傅利叶自研的全感交互系统,集成听觉、视觉、触觉三大模块,通过协同反馈实现更自然、拟人的情感互动。GR-3的每一处设计致力于成为能够读懂情绪、传递善意的社交伙伴,在公共服务空间中,用自然的交互方式,构建温暖的人机情感连接及智能协作。
产品组成
Fourier GR-3通用人形机器人由头部、胸腔、手臂、灵巧手、腰部和腿部等主要部件组成,全身配备多达55个自由度,可支持更拟人化的肢体表达。
- 头部:具备2个自由度,搭载单目摄像头以实现视觉感知功能,同时配备两块眼部显示屏,保证美观的同时兼顾实用性与拓展性。
- 胸腔:内部集成了机器人主机、电源管理板、通讯板及可热插拔电池组等核心组件,承担系统的运算控制与能源分配管理功能。
- 手臂:单臂采用包含肩关节、肘关节及腕关节的设计,具备7个自由度,可确保在空间中拥有广泛的运动范围与高灵活度的操作能力。
- 灵巧手:标准配置下,搭载6自由度灵巧手;可选配12自由度灵巧手以支持高精度、精细化的操作任务。
- 腰部:具备3个自由度,使机器人在作业过程中具备更灵活的方向调整能力。
- 腿部:每条腿均搭载6个自由度的关节组合,确保机器人在复杂的地形条件下保持稳定的姿态,并实现灵活的移动。
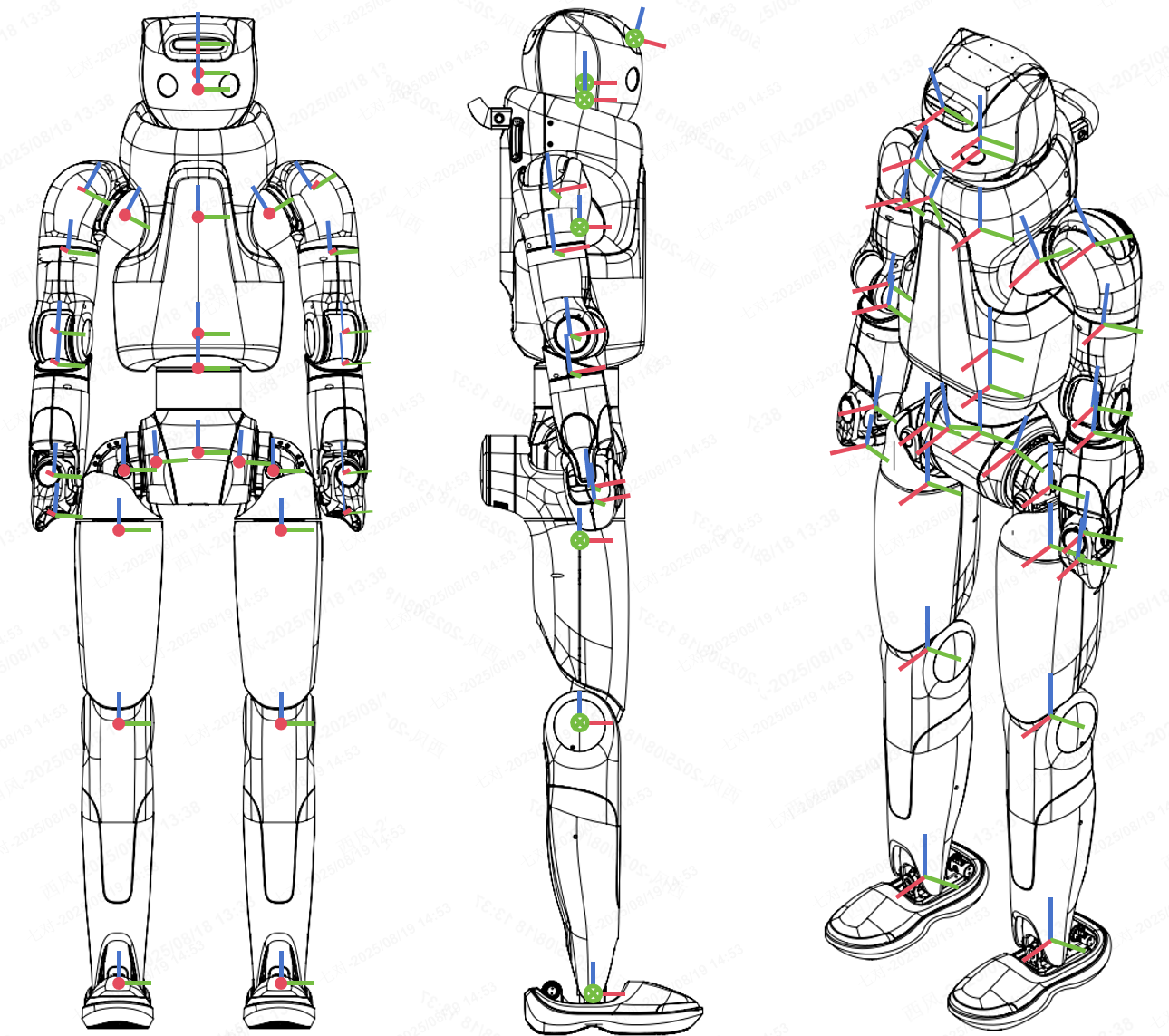
坐标系、关节旋转轴及关节零点
GR-3的关节旋转坐标系采用右手坐标系,各轴颜色标识如下图所示:X轴为红色,Y轴为绿色,Z轴为蓝色。同时图中也包含了关节旋转轴及零点位置信息。在坐标系中,机器人的关节旋转可分为三个基本方向:绕X轴旋转称为Roll方向,绕Y轴旋转轴为Pitch方向,绕Z轴旋转称为Yaw方向。
关节对照图与运动限位
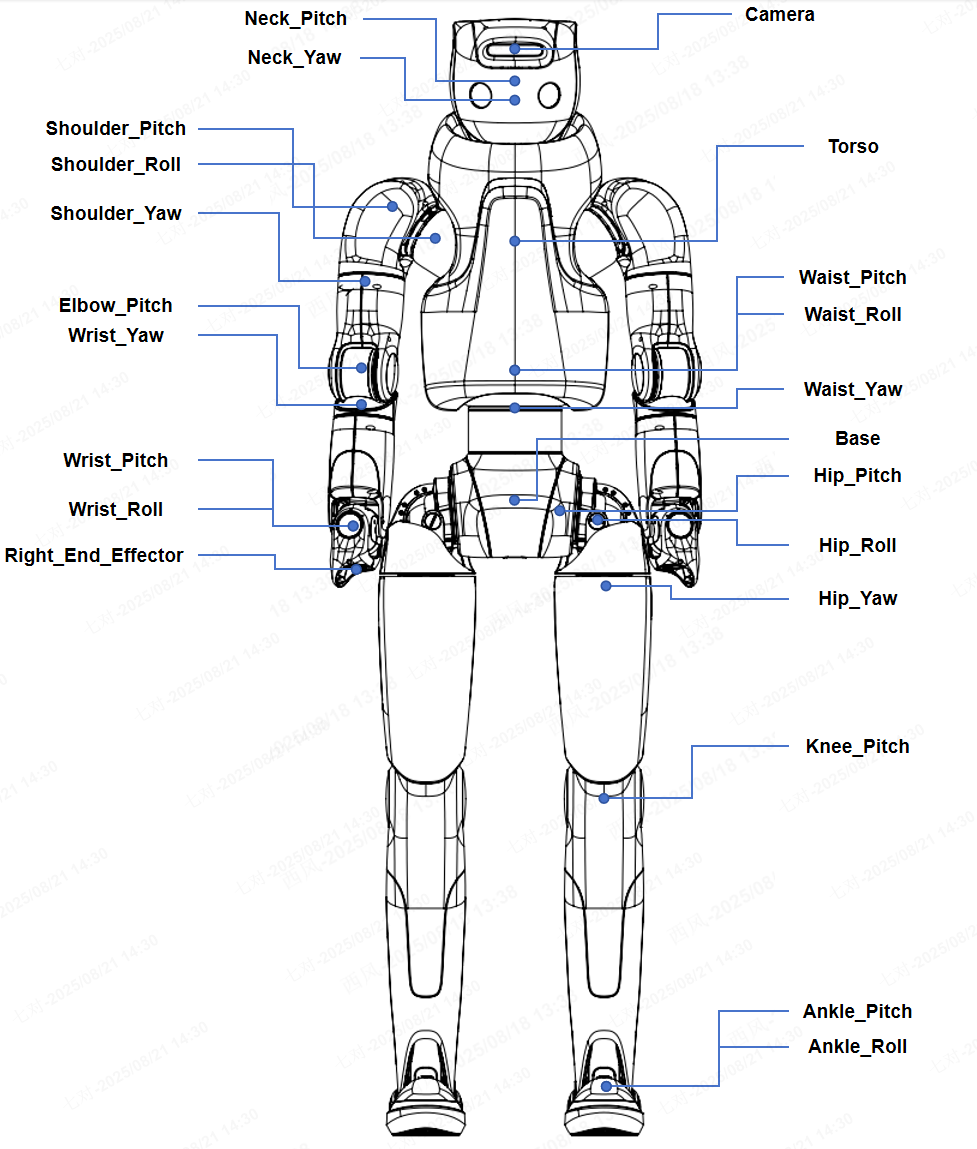
各个关节的运动限位如下表
| 序号 | 序号关节名称 | 控制组名称 | 位置上限 (rad) | 位置下限 (rad) | 速度上限 (rad/s) | 扭矩上限 (Nm) |
|---|---|---|---|---|---|---|
| 0 | left_hip_pitch_joint | left_leg | 2.618 | -2.618 | 6.49 | 366.0 |
| 1 | left_hip_roll_joint | left_leg | 1.5708 | -0.17453 | 12.985 | 140.4 |
| 2 | left_hip_yaw_joint | left_leg | 1.5708 | -0.69813 | 12.985 | 140.4 |
| 3 | left_knee_pitch_joint | left_leg | 2.3562 | 0.0 | 6.49 | 366.0 |
| 4 | left_ankle_pitch_joint | left_leg | 0.7854 | -0.7854 | 16.76 | 59.4 |
| 5 | left_ankle_roll_joint | left_leg | 0.43633 | -0.43633 | 16.76 | 59.4 |
| 6 | right_hip_pitch_joint | right_leg | 2.618 | -2.618 | 6.49 | 366.0 |
| 7 | right_hip_roll_joint | right_leg | 0.17453 | -1.5708 | 12.985 | 140.4 |
| 8 | right_hip_yaw_joint | right_leg | 0.69813 | -1.5708 | 12.985 | 140.4 |
| 9 | right_knee_pitch_joint | right_leg | 2.3562 | 0.0 | 6.49 | 366.0 |
| 10 | right_ankle_pitch_joint | right_leg | 0.7854 | -0.7854 | 16.76 | 59.4 |
| 11 | right_ankle_roll_joint | right_leg | 0.43633 | -0.43633 | 16.76 | 59.4 |
| 12 | waist_yaw_joint | waist | 2.618 | -2.618 | 12.985 | 140.4 |
| 13 | waist_roll_joint | waist | 0.17453 | -0.17453 | 14.77 | 108.6 |
| 14 | waist_pitch_joint | waist | 0.5236 | -0.20944 | 14.77 | 108.6 |
| 15 | head_yaw_joint | head | 1.3963 | -1.3963 | 9.21 | 17.4 |
| 16 | head_pitch_joint | head | 0.5236 | -0.5236 | 9.21 | 17.4 |
| 17 | left_shoulder_pitch_joint | left_manipulator | 2.9671 | -2.9671 | 7.75 | 74.4 |
| 18 | left_shoulder_roll_joint | left_manipulator | 1.9199 | -0.2618 | 7.75 | 74.4 |
| 19 | left_shoulder_yaw_joint | left_manipulator | 1.8326 | -1.8326 | 6.28 | 42.9 |
| 20 | left_elbow_pitch_joint | left_manipulator | 0.087266 | -2.2689 | 6.28 | 42.9 |
| 21 | left_wrist_yaw_joint | left_manipulator | 1.8326 | -1.8326 | 6.28 | 42.9 |
| 22 | left_wrist_pitch_joint | left_manipulator | 1.309 | -0.87266 | 9.2153 | 17.4 |
| 23 | left_wrist_roll_joint | left_manipulator | 1.2217 | -1.0472 | 9.2153 | 17.4 |
| 24 | right_shoulder_pitch_joint | right_manipulator | 2.9671 | -2.9671 | 7.75 | 74.4 |
| 25 | right_shoulder_roll_joint | right_manipulator | 0.2618 | -1.9199 | 7.75 | 74.4 |
| 26 | right_shoulder_yaw_joint | right_manipulator | 1.8326 | -1.8326 | 6.28 | 42.9 |
| 27 | right_elbow_pitch_joint | right_manipulator | 0.087266 | -2.2689 | 6.28 | 42.9 |
| 28 | right_wrist_yaw_joint | right_manipulator | 1.8326 | -1.8326 | 6.28 | 42.9 |
| 29 | right_wrist_pitch_joint | right_manipulator | 1.309 | -0.87266 | 9.2153 | 17.4 |
| 30 | right_wrist_roll_joint | right_manipulator | 1.0472 | -1.2217 | 9.2153 | 17.4 |
电气接口

| 序号 | 接口名称 | 说明 |
|---|---|---|
| 1 | 电池组开关键 | 用于实现电池组的上电及下电功能 |
| 2 | 电量指示灯 | 直观地显示电池组当前的电量状态和充电进度,提示用户电池组是否需要充电、是否正在充电及充电是否完成 |
| 3 | 急停键 | 按下急停键时,执行器即刻下电停止工作;顺时针旋转急停帽可使急停键复位关闭急停,执行器上电,恢复正常工作状态 |
| 4 | 充电接口 | 将充电器插头红色圆点对齐对应插入,即可为电池组充电 |
| 5 | 系统开关机键 | 长按“系统开关机键”,等待“绿灯”闪烁后松开按键,绿灯常亮时,系统开机完成 |
| 6 | 对外供电口 | 1.提供的输出电压/电流:19V/3A,接口的红色标记处为电源正极。2.插头型号:02.FGG.0B.002.CA42ZN。 |
| 7 | 外部急停接口 | 连接“外部急停装置”,按下外部急停装置上的急停键时,执行器即刻下电停止工作;顺时针旋转急停帽可使急停键复位,关闭急停,执行器上电,恢复正常工作状态 |
| 8 | Type-C接口 | NUC控制器的Type-C接口,可通过连接扩展坞模块,完成扩展NUC控制器的USB和HDMI外设。注:扩展坞需要在系统上电之前连接好 |
| 9 | 以太网接口 | 千兆以太网接口,可以实现与整机系统通信。 |
核心参数表
| 参数类别 | 参数名称 | 参数详情 |
|---|---|---|
| 机械参数 | 尺寸 | 1642mm x 552mm x 292mm |
| 臂展 | 1395mm | |
| 臂展+自研灵巧手 | 最高可达1759mm(12自由度灵巧手版本) | |
| 小腿 + 大腿长度 | 425mm + 408mm | |
| 净重 | ≈71 kg | |
| 材质 | 铝合金+工程塑料+软包材质 | |
| 电气参数 | 标称电压 | 46.8V |
| 额定功率 | ≈936W | |
| 性能参数 | 外行速度 | 6.1km/h |
| 单手载荷 | ≈3kg | |
| 基础算力 | 8核16线螺旋性能CPU | |
| 总执行器数量 | 最高可达55 | |
| 最大关节峰值扭矩 | 440N·m | |
| 头部自由度 | 2 | |
| 单腿自由度 | 6 | |
| 腰部自由度 | 3 | |
| 单手臂自由度 | 7 | |
| 单手基础自由度 | 6 | |
| 单手高自由度 | 可选装12自由度灵巧手 | |
| 双脚自由度 | 支持绝对端码器 | |
| 通讯方式 | Ethernet | |
| 电池参数 | 电池容量 | 702Wh + 234Wh |
| 电池类型 | 锂离子电池 | |
| 总重量 | 3.8kg + 1.3kg | |
| 电池标称电压 | 46.8V | |
| 充电限制电压 | 54.6V | |
| 循环寿命 | ≥500 (80%DOD) | |
| 续航时间 | ≈3h | |
| 充电时间 | ≈1.5h | |
| 热插拔 | 支持热插拔换电 | |
| 充电器输入参数 | 输入电压范围: 90VAC~260VAC, 50HZ/60HZ | |
| 充电器输出参数 | 输出电压电流: 54.6V, 12A MAX | |
| 中央处理器 | 操作系统 | Ubuntu 22.04 |
| 处理器 | AMD Ryzen 7 8845HS | |
| I/O | Type-C, USB3.0, RJ45 | |
| 交互能力 | 遥操作 | 支持远程沉浸式操控 (Pico/VisionPro/Quest) |
| 语音交互 | 支持回声消除,声源定位,语音交互,语音对话 | |
| 感知传感器配置 | 摄像头 | 单目摄像头 |
| IMU | 6轴,支持加速度和角速度的检测 | |
| 麦克风 | 可实现360度全向收声 | |
| 扬声器 | 最大支持15W,音量支持调整 | |
| 触觉 | 支持 |