关于灵巧手
傅利叶仿生五指灵巧手采用仿人尺寸的五指设计,内置6个线性执行器及控制电路,具备6个主动自由度(拇指2个,其余四指各1个)和5个被动自由度,共计11个可活动关节。通过PID控制算法,可实现不同速度与力控下的拟人化复杂抓取操作,同时提供标准SDK支持二次应用开发。
产品组成

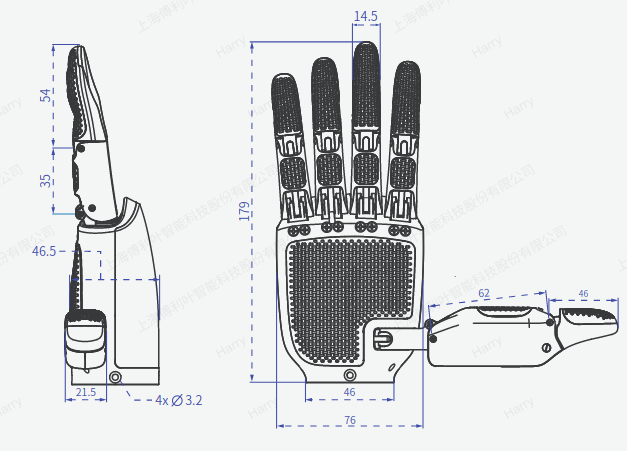
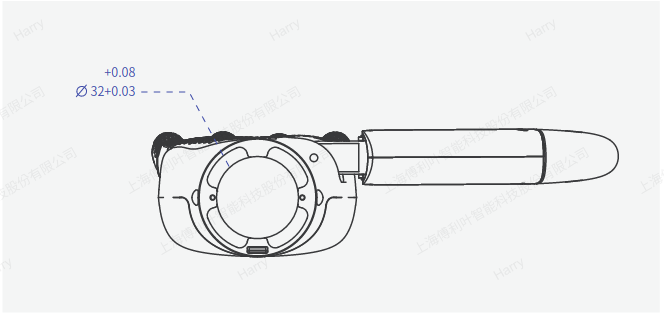
外观尺寸
关节介绍
| 关节 | 图示 | 范围 |
|---|---|---|
| 食指 中指 无名指 尾指 |  | 0° ~ 90° |
| 拇指弯曲 |  | 0° ~ 70° |
| 拇指侧摆 | 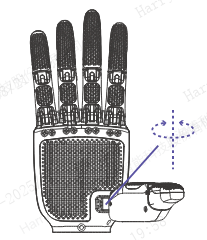 | 0° ~ 100° |
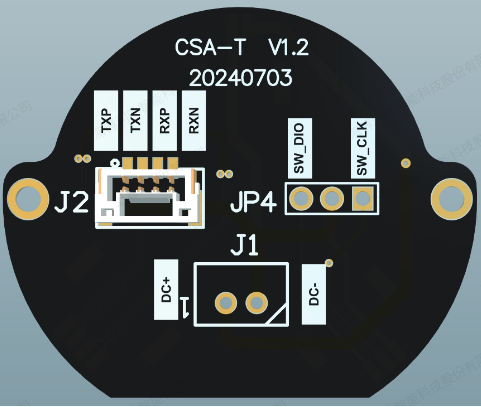
接口说明
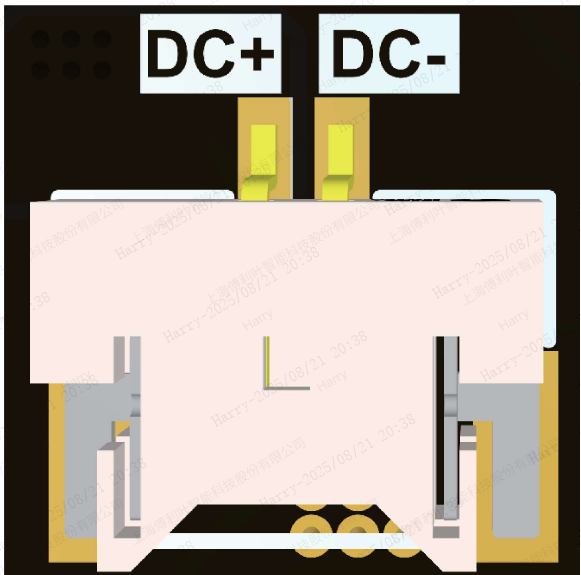
电源接口
- 直流供电:12V ~ 65V
- 极性:左边正极,右边负极
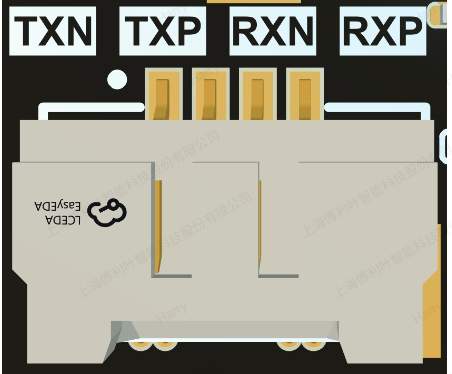
通讯接口
- 100 Mbps 四线以太网
- 从左到右分别是 TXN, TXP, RXN, RXP
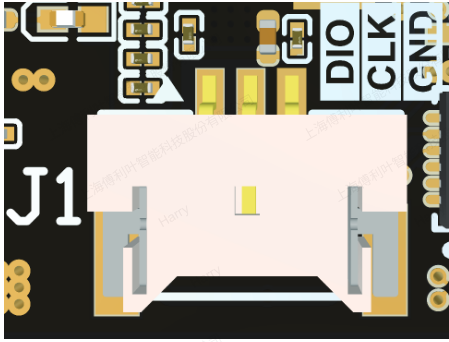
SWD 调试接口
- SWD接口作为标准程序下载和在线调试接口使用。
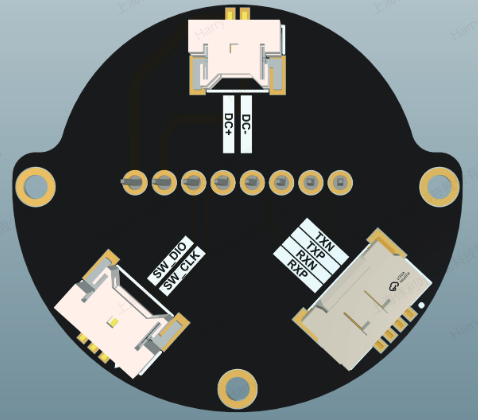
腕部转接板接口
- 快插式连接器,分别对应电源接口、百兆四线以太网、烧录插针。
- MX1.25 2P/3P/4P 卧贴薄型线对板连接器,用以连接灵巧手驱动。
技术参数
| 参数类别 | 参数名称 | 参数值 |
|---|---|---|
| 机械参数 | 尺寸(手长 × 掌宽 × 掌厚) | 179mm × 76mm × 46.5mm |
| 重量 | 515g | |
| 关节总数 | 11 | |
| 主动自由度 | 6 | |
| 主体材质 | 金属合金、硅胶等其他材料 | |
| 驱动类型 | 空心杯电机 | |
| 传动方式 | 连杆 | |
| 控制模式 | 位置、速度控制 | |
| 电气参数 | 供电电压 | 12V~60V,推荐46V, 2A |
| 通讯接口 | Ethernet | |
| 工作温度 | 建议使用温度:0℃~40℃ | |
| 性能参数 | 指尖力平均值 | 6N |
| 整手最大负载 | 40kg | |
| 单指最大负载 | 10kg | |
| 指尖重复定位精度 | 0.5mm | |
| 手指开合循环时间 | < 1s |