关于Fourier N1
傅利叶Nexus1(Nexus1以下简称为N1)通用人形机器人身高1.3米,体重38公斤,兼具灵活性与动态稳定性。全身覆盖23个自由度,支持复杂动作控制与多场景适应能力。实现最高稳定奔跑速度可达3.5米/秒,动态平衡表现优异。可稳定实现行走、跑步、15°~20°坡度斜坡通行及20厘米高度楼梯攀爬。支持盲走楼梯、单足站立及撑地爬起等高难度动作。
产品组成
-
N1通用人形机器人由头部、胸腔、手臂、腰部和腿部等主要部件组成,全身覆盖23个自由度,使其能够执行复杂的动作序列。
-
头部:头部无自由度,支持灵活扩展,可自主加载视觉传感器(如双目深度相机等),满足多样化感知需求。
-
胸腔:胸腔内部集成了机器人主机、电源管理模块、交换机等组件,承担系统运算控制与能源分配管理的核心功能。
-
手臂:单臂设计包含肩关节、肘关节等,提供5个自由度,确保在空间中具备广泛的运动范围和高灵活度的操作能力。
-
腰部:设有1个自由度的旋转关节支持机器人整体的水平转向动作,增强其在作业过程中的方向调整能力。
-
腿部:每条腿配备6个自由度的关节组合,确保机器人在复杂地形条件下保持稳定姿态,并实现灵活的移动。
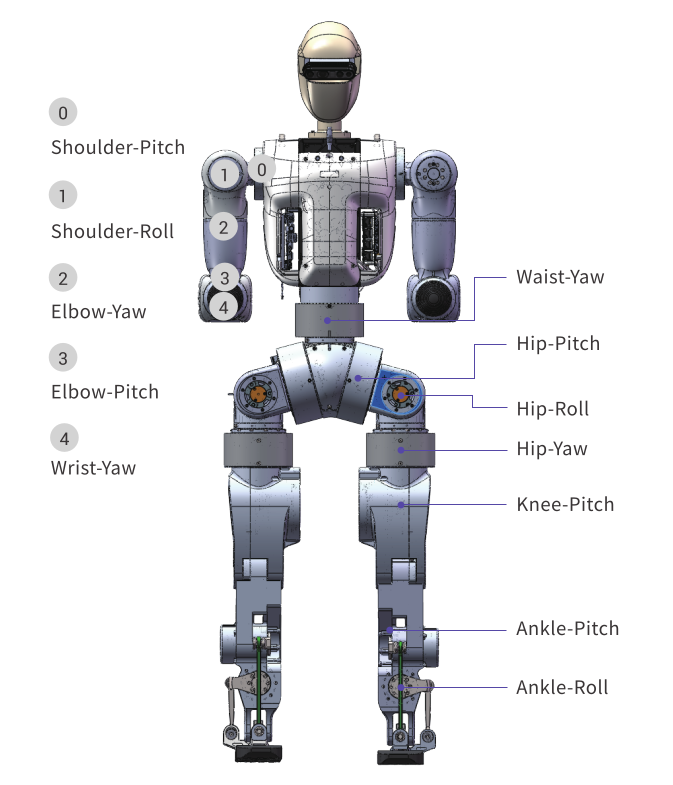
关节对照图与运动限位
Fourier N1全身共有23个关节,包括左臂和右臂分别5个关节,腰部1个,左腿和右腿各6个,其位置对照图以及各关节限位表如下
| 序号 | 序号关节名称 | 控制组名称 | 位置上限 (rad) | 位置下限 (rad) | 速度上限 (rad/s) | 扭矩上限 (Nm) |
|---|---|---|---|---|---|---|
| 1 | left_hip_pitch_joint | left_leg | 2.617 | -2.617 | 16.2 | 90 |
| 2 | left_hip_roll_joint | left_leg | 1.57 | -0.261 | 14.738 | 54 |
| 3 | left_hip_yaw_joint | left_leg | 2.617 | -2.617 | 14.738 | 54 |
| 4 | left_knee_pitch_joint | left_leg | 2.356 | -0.0872 | 16.2 | 90 |
| 5 | left_ankle_roll_joint | left_leg | 0.436 | -0.436 | 16.747 | 30 |
| 6 | left_ankle_pitch_joint | left_leg | 0.436 | -0.436 | 16.747 | 30 |
| 7 | right_hip_pitch_joint | right_leg | 2.617 | -2.617 | 16.2 | 90 |
| 8 | right_hip_roll_joint | right_leg | 0.261 | -1.57 | 14.738 | 54 |
| 9 | right_hip_yaw_joint | right_leg | 2.617 | -2.617 | 14.738 | 54 |
| 10 | right_knee_pitch_joint | right_leg | 2.356 | -0.0872 | 16.2 | 90 |
| 11 | right_ankle_roll_joint | right_leg | 0.436 | -0.436 | 16.747 | 30 |
| 12 | right_ankle_pitch_joint | right_leg | 0.436 | -0.436 | 16.747 | 30 |
| 13 | waist_yaw_joint | waist | 2.617 | -2.617 | 14.738 | 54 |
| 14 | left_shoulder_pitch_joint | left_manipulator | 2.966 | -2.966 | 14.738 | 54 |
| 15 | left_shoulder_roll_joint | left_manipulator | 2.792 | -0.174 | 16.747 | 30 |
| 16 | left_shoulder_yaw_joint | left_manipulator | 1.832 | -1.832 | 16.747 | 30 |
| 17 | left_elbow_pitch_joint | left_manipulator | 1.658 | -0.349 | 16.747 | 30 |
| 18 | left_wrist_yaw_joint | left_manipulator | 1.832 | -1.832 | 16.747 | 30 |
| 19 | right_shoulder_pitch_joint | right_manipulator | 2.966 | -2.966 | 14.738 | 54 |
| 20 | right_shoulder_roll_joint | right_manipulator | 0.174 | -2.792 | 16.747 | 30 |
| 21 | right_shoulder_yaw_joint | right_manipulator | 1.832 | -1.832 | 16.747 | 30 |
| 22 | right_elbow_pitch_joint | right_manipulator | 1.658 | -0.349 | 16.747 | 30 |
| 23 | right_wrist_yaw_joint | right_manipulator | 1.832 | -1.832 | 16.747 | 30 |
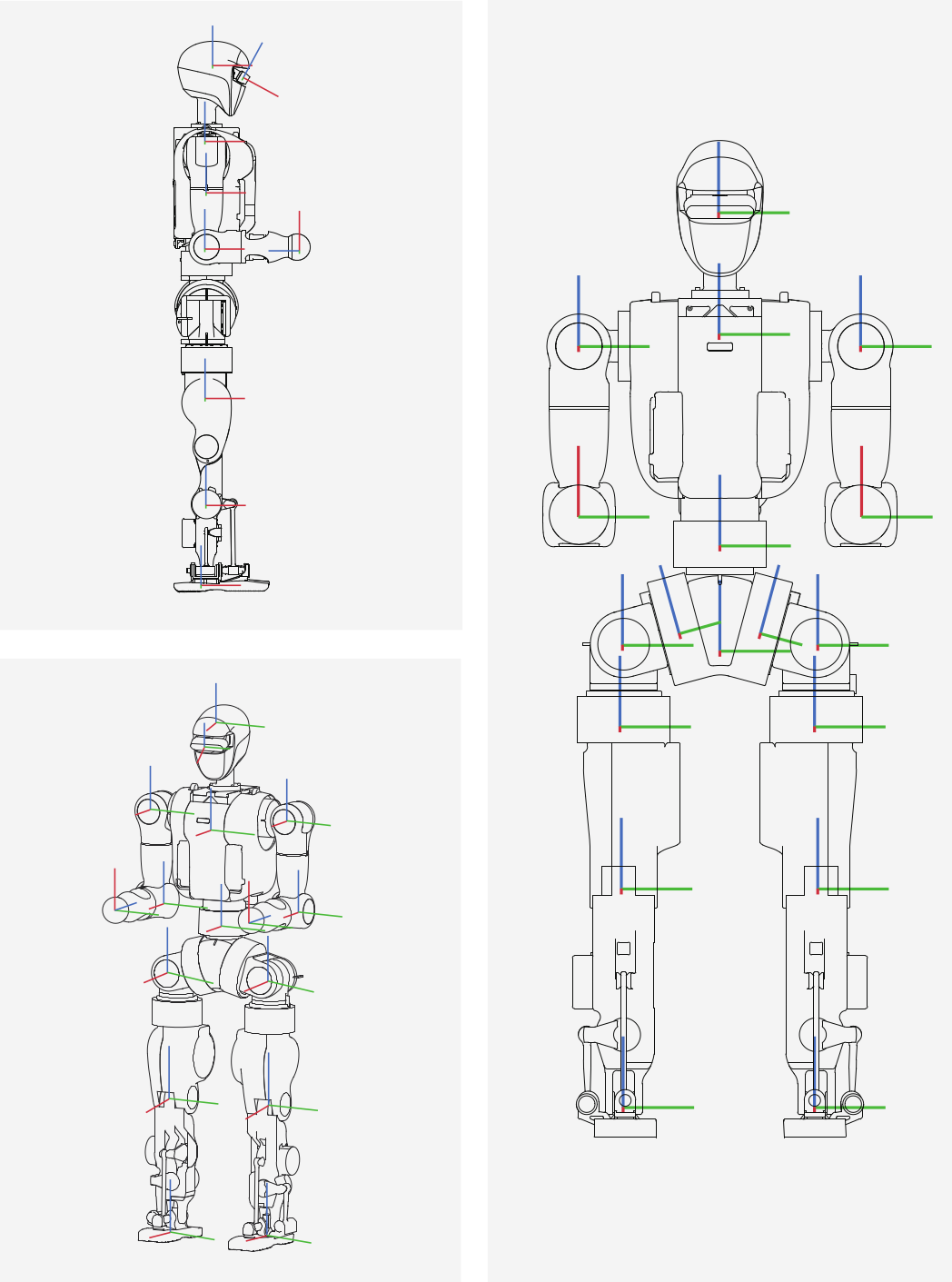
坐标系、关节旋转轴及关节零点
Fourier N1的关节旋转坐标系采用右手坐标系,各轴颜色标识如下图所示:X轴为红色,Y轴为绿色,Z轴为蓝色。同时图中也包含了关节旋转轴及零点位置信息。在坐标系中,机器人的关节旋转可分为三个基本方向:绕X轴旋转称为Roll方向,绕Y轴旋转轴为Pitch方向,绕Z轴旋转称为Yaw方向。
电气接口

| 序号 | 接口名称 | 说明 |
|---|---|---|
| 1 | 电池开关键 | 用于给机器人上电 |
| 2 | 系统开关机键 | 用于系统开机和状态显示 |
| 3 | 充电接口 | 用于为设备充电使用 |
计算机性能
| 类型 | 运动控制模块 |
|---|---|
| 处理器 | Intel® Core™ i7-13700H |
| 计算性能 | 8核高性能CPU |
| 内存 | 16 GB |
| 硬盘 | 512GB NVMe |
| 有线网络 | 100M/1000M/2500M |
| 无线网络 | Wi-Fi 6 |
核心参数表
| 参数类别 | 参数名称 | 参数详情 |
|---|---|---|
| 机械参数 | 尺寸 | 1245 mm × 441 mm × 202 mm |
| 臂展 | 1240 mm | |
| 净重 | ≈39 kg | |
| 材质 | 铝合金-工程塑料 | |
| 电气参数 | 额定电压 | 39.6V |
| 额定功率 | ≈460W | |
| 性能参数 | 步行速度 | 2.7 km/h |
| 奔跑速度 | 10.8 km/h | |
| 基础算力 | 8核高性能CPU | |
| 关节参数 | 总执行器数量 | 23 |
| 最大关节峰值扭矩 | 144 N·m | |
| 工作电压 | 24-60V | |
| 额定电压 | 46V | |
| 双编码器 | 16bit/14bit | |
| 通讯方式 | Ethernet | |
| 电池及适配器参数 | 电池类型 | 锂离子电池 |
| 电池容量 | 475WH | |
| 总重量 | ≤3.2kg | |
| 电池标称电压 | 39.6V | |
| 充电限制电压 | 46.2V | |
| 循环寿命 | 25℃, 10A放电, 大于800次, SOH80% | |
| 续航时间 | ≈2h | |
| 充电时间 | ≈3.5h | |
| 适配器输入参数 | 100-240V-50/60Hz | |
| 适配器输出参数 | 46V 4A | |
| 中央处理器 | 操作系统 | Ubuntu 22.04 |
| 处理器 | Intel® Core™ i7-13700H | |
| 计算机性能 | 8核高性能CPU | |
| 内存 | 16GB | |
| 硬盘 | 512GB NVMe | |
| I/O | HDMI/Type-C/Type-A | |
| 有线网络 | 100M/1000M/2500M | |
| 无线网络 | Wi-Fi 6 | |
| 传感器参数 | 摄像头 | 双目深度相机(选配) |
| IMU | 6轴支持加速度和角速度的检测 |