关于GR-1
傅利叶通用人形机器人 GR-1 系列是自主研发,可商业化量产的人形机器人。GR-1 系列拥有高度仿生的躯干构型和拟人化的运动控制,全身最多达44个自由度,最大关节峰值扭矩达230N.m,具备快速行走、稳健上下坡、抗冲击干扰等运动功能,是通用人工智能的理想载体。
产品组成
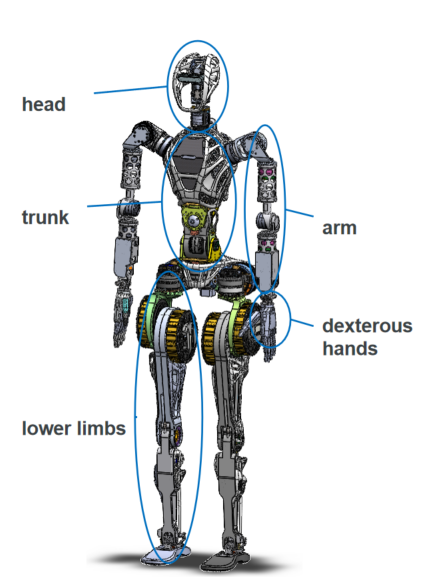
GR-1主要有五大组成部分:头部、躯干、手臂、灵巧手以及下肢。
头
头部配备双深度相机为机器人提供视觉功能,可实现三自由度运动(pitch, roll和yaw)

躯干
躯干包括胸部、背部和腰部。胸部内置主控板与计算单元,背部容纳电池组,腰部可实现三自由度运动(pitch, roll和yaw)

手臂
手臂包含肩关节、肘关节和腕关节。肩关节具有三个运动自由度:屈伸运动、收展运动及内外旋运动。肘关节具有一个自由度:屈伸运动。腕关节具备三个自由度:内外旋运动、桡尺偏转以及掌屈背伸。其中桡尺偏转与掌屈背伸通过双自由度并联结构实现。

灵巧手
灵巧手是一种仿生机器人末端执行器,其设计旨在模拟人类手部的灵活性与精确性。该装置具有六个运动自由度,每个自由度代表独立的运动模式,使其能够执行多种复杂操作任务。
灵巧手的六个自由度包括:拇指的外展与内收运动、拇指的旋转运动,以及食指、中指、无名指和小指各具一个的屈伸自由度。拇指的双自由度设计使其能够实现对掌运动并灵活调整位姿,显著提升抓取与操控能力;其余四指的独立屈伸运动则使其能自适应不同形状尺寸的物体,有效提高整体抓握稳定性与力度控制精度。

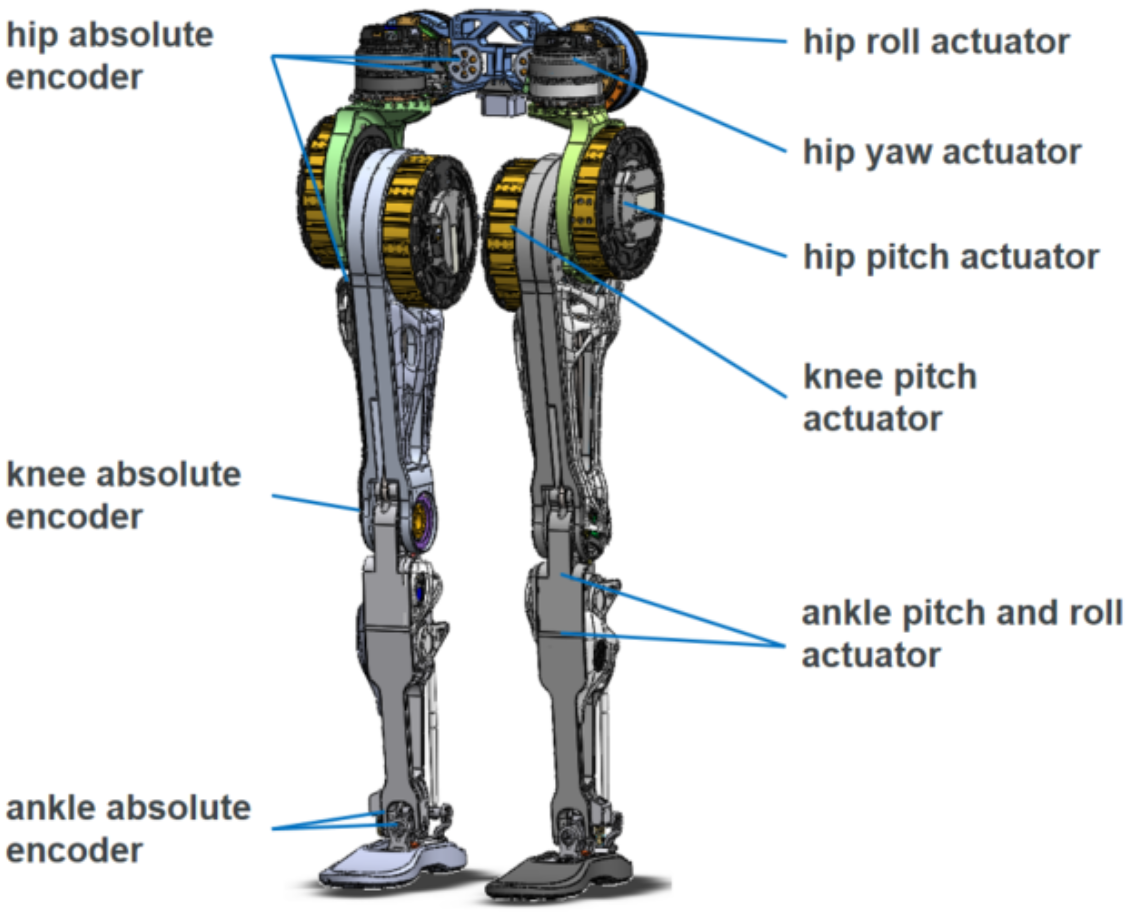
下肢
下肢包含髋关节、膝关节与踝关节。髋关节具备三个运动自由度:内收外展、内外旋及屈伸运动。膝关节具有单一自由度:屈伸运动。踝关节通过并联结构实现背屈跖屈与内外翻两个自由度。
电气系统
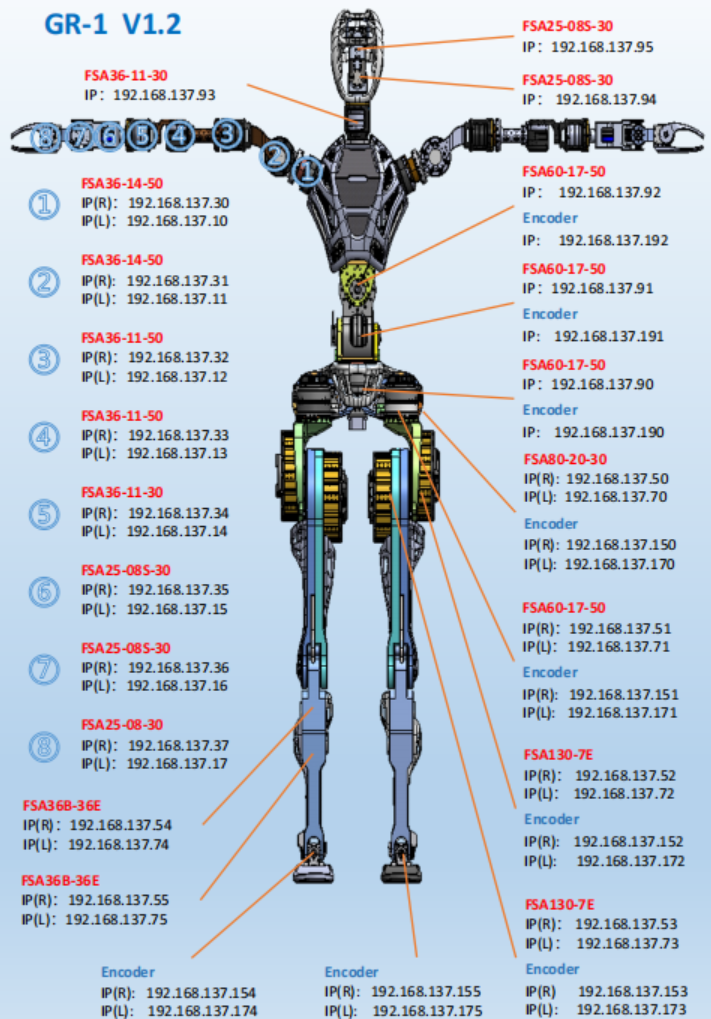
GR-1机器人的电气系统旨在为各组件提供稳健的通信与电源管理能力。该系统包含头部、躯干、手臂、下肢、电源管理模块及交换系统等关键部分。所有组件通过以太网总线互联,并由统一的46V中央电源供电,以此确保系统流畅运行,满足先进机器人任务所需的精确控制要求。
各组件 IP 配置
-
头: 机器人颈部由三个驱动器组成,通过以太网总线串联进行通信。其电源来自电源管理模块,工作电压为46V。头部装有一个深度相机,通过USB-Type-C数据线与主控制器通信。
-
躯干: GR-1的躯干包含一个电源管理模块、一个交换机和一个主运动控制单元。所有以太网通信最终都汇聚到交换机板上的主运动控制模块,用以控制所有驱动器。躯干上的按钮主要包括控制器按钮、急停按钮和电源开关按钮,它们分别连接到电源管理模块进行控制。躯干背部内置一块46.2V锂电池,由配套的直流充电器进行充电。
-
手臂: GR-1的双臂主要由每侧七个驱动器(共十四个)和一对灵巧手构成。每个驱动器采用“以太网通信+46V电源”的方式串联连接。手臂末端通过以太网转RS485的方式与灵巧手通信。
-
下肢: GR-1的腰部装有3个驱动器,它们与右腿串联连接;每条腿则由6个驱动器构成。所有驱动器均通过46V电源线和以太网线进行串联。我们在腿部每个主动关节均配备了一个末端绝对值编码器,用于位置检测。
-
电源管理模块: GR-1的电源管理模块拥有多个接口,包括急停按钮接口、启停按钮接口以及电池充电器接口。我们的锂电池组连接到该模块。主控单元(MCU)可通过控制固态继电器的通断来管理整个驱动器系统的电源供应。此模块具备电压检测和电流控制功能。此外,该模块还集成了运动控制模块的供电接口、呼吸灯控制接口、冷却风扇控制接口以及USB串口调试接口。模块本身亦具备以太网通信功能。通过以太网总线,它可以连接到我们整个机器人的局域网,上位机软件可以实时读取电源管理模块的状态信息。
-
交换系统: 该交换模块配有8个标准千兆以太网接口。控制器通过这些接口向各个驱动器发送运动控制指令。
计算机参数
| 参数名称 | 参数详情 |
|---|---|
| 操作系统 | Ubuntu20.04+ROS 2 |
| 电脑主机 | 华硕(ASUS)13代 破晓X MINI商用家用办公主机 |
| 型号 | PN64171RZ |
| CPU | I7 13700H |
| 运行内存 | 16G |
| SSD | 512G |
| 无线连接 | Wi-Fi,EEE 80211a/b/g/n/ac;蓝牙4.2 |
| 外置接口 | HDMIx1,Type-Cx3(快充,下载,外设扩展口) |
机器人规格参数
机械参数
| 参数名称 | 参数详情 |
|---|---|
| 尺寸 | 1650X524X325mm |
| 臂展 | 1764mm |
| 净重 | ≈52kg |
| 材质 | 铝合金+工程塑料 |
电气参数
| 参数名称 | 参数详情 |
|---|---|
| 供电电压 | 46.2V |
| 工作最大功率 | ≈550W |
性能参数
| 参数名称 | 参数详情 |
|---|---|
| 步行速度 | 5km/h |
| 单手载荷 | ≈3kg |
| 基础算力 | i7-13700h 6P+8E 20线程 1.6/5.0GHz |
关节参数
| 参数名称 | 参数详情 |
|---|---|
| 总执行器数量 | 44/34 |
| FSA执行器数量 | 32 |
| 最大关节扭矩 | 230N.m |
| 工作电压 | 12-60V |
| 额定电压 | 46V |
| 最大电流 | 40A |
| 执行标准 | GB 17625.1-2012,GB 4943.1-2011,GB/T 9254-2008 |
传感器参数
| 参数名称 | 参数详情 |
|---|---|
| 深度相机 | Realsense |
| IMU | 有 |
电池及电源适配器
| 参数名称 | 参数详情 |
|---|---|
| 电池容量 | 483Wh |
| 电池类型 | 锂离子电池 |
| 电池标称电压 | 40V |
| 充电限制电压 | 46V |
| 额定容量 | 5.2Ah 112.3Wh |
| 续航时间 | ≈60min |
| 行走续航时间 | ≈45min |
| 充电时间 | 315min |
| 适配器输入参数 | 100-240V-50/60Hz |
| 适配器输出参数 | 46V 2A MAX |