机器人关机
本文介绍如何安全地关闭机器人控制程序
掌机关机
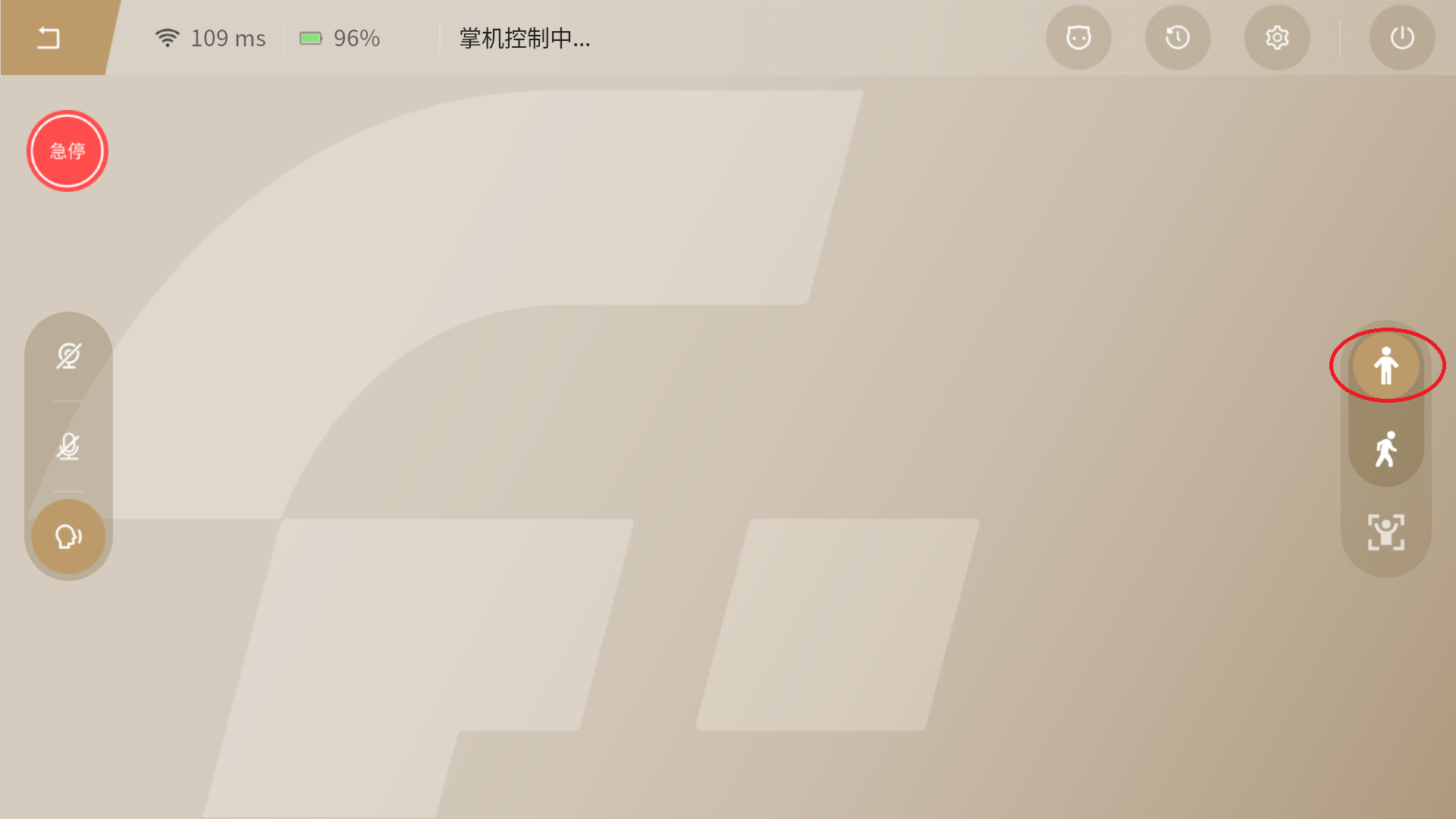
- 使用完成后,若机器人处于全身模式下,点击“站立”按钮,使机器人进入站立姿态,便于悬吊操作。(上肢模式下机器人处于安全保护状态不需要此操作)
- 全身模式下,使用移位机控制机器人上升,吊起机器人,将机器人抬升至双足离地足够高度。(上肢模式下机器人处于安全保护状态不需要此操作)
⚠️ 注意: 全身模式时,悬吊前需确保机器人处于站立状态,行走状态下悬吊会导致机器人下肢不受控制。
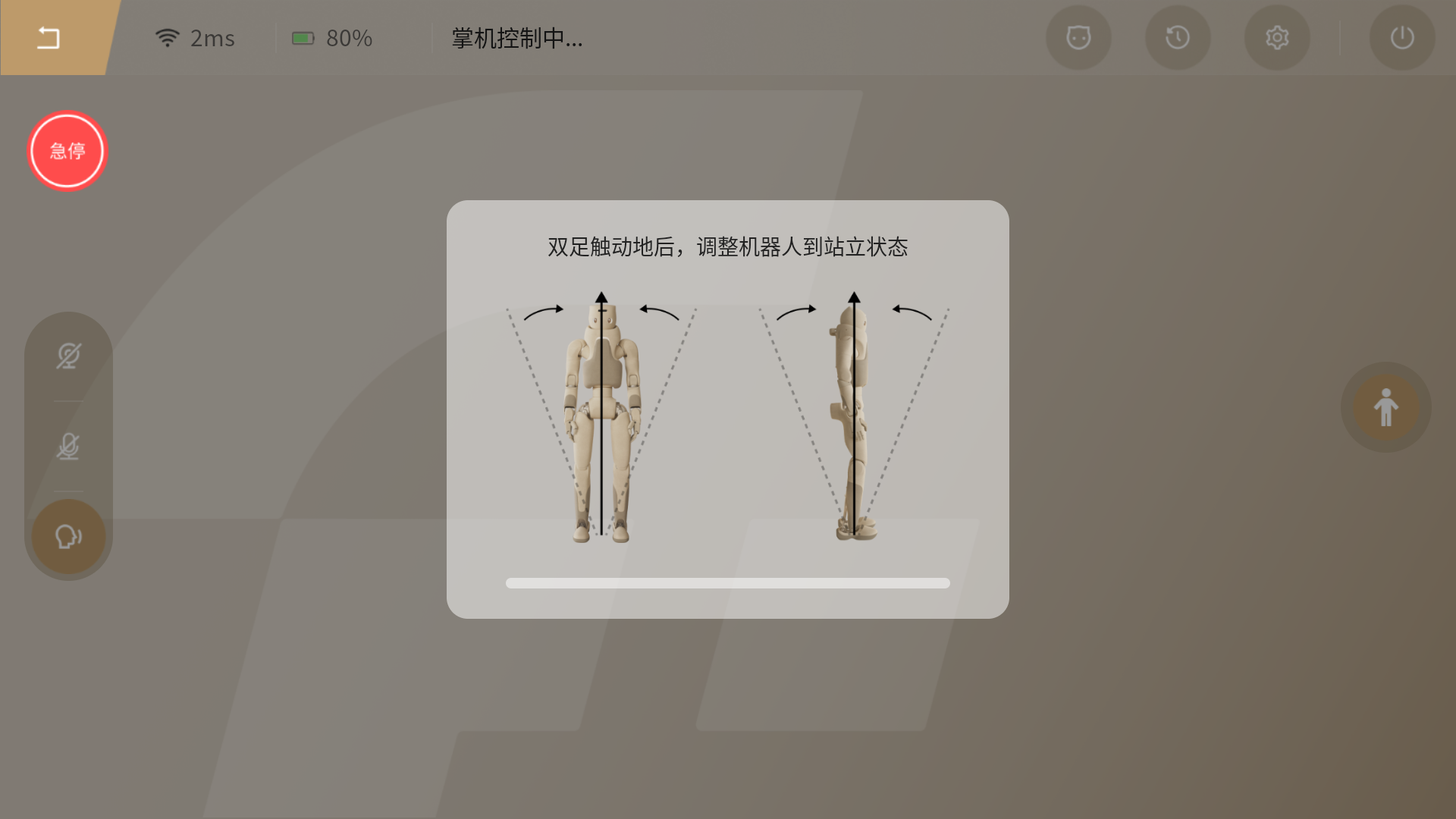
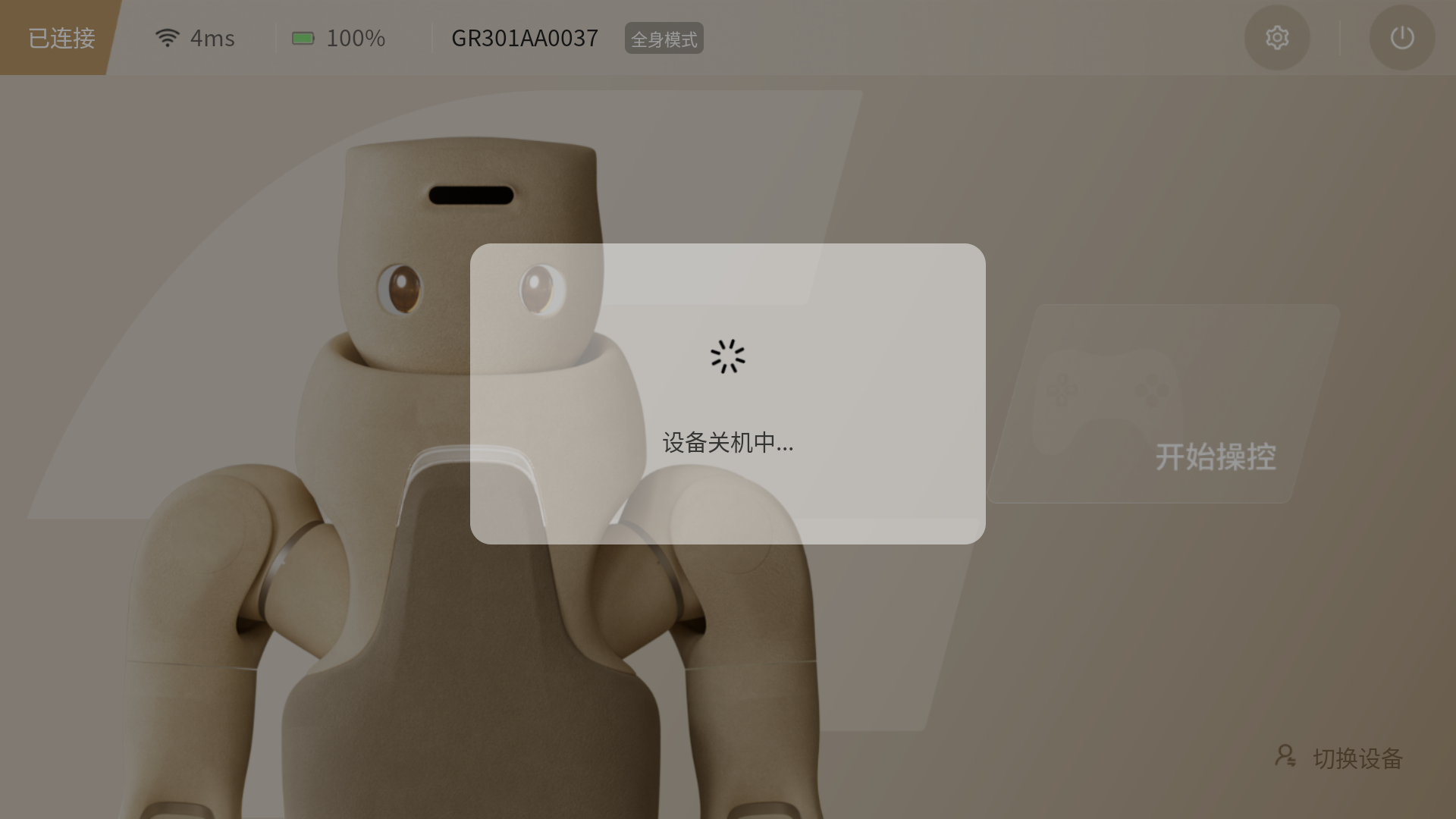
- 返回到首页,点击“关机”按钮后,机器人将整机断电。

- 确认关机后,机器人会进入关机状态,关机成功后弹框会消失
- 上肢模式下机器人处于安全保护状态,可以直接关闭程序
手动关机
⚠️ 注意: 在手动关机前,机器人同样需要进入安全保护状态,并打开急停。
长按电池开关,直到灯光熄灭后,又闪烁数次再次熄灭,这时才能松开,机器人的眼睛熄灭,完成关机
⚠️ 注意:
因为GR-3采用了双电池设计,如果松开过早,则内部的电池仍然在给机器人供电,机器人眼睛保持亮起