About GR-1
The Fourier General-Purpose Humanoid Robot GR-1 series is a self-developed, commercially mass-producible humanoid robot. The GR-1 series features a highly bionic body structure and human-like motion control, with up to 44 degrees of freedom throughout the body and a maximum joint peak torque of 230N.m. It is capable of fast walking, stable slope climbing, and impact resistance, making it an ideal carrier for general artificial intelligence.
Product Composition
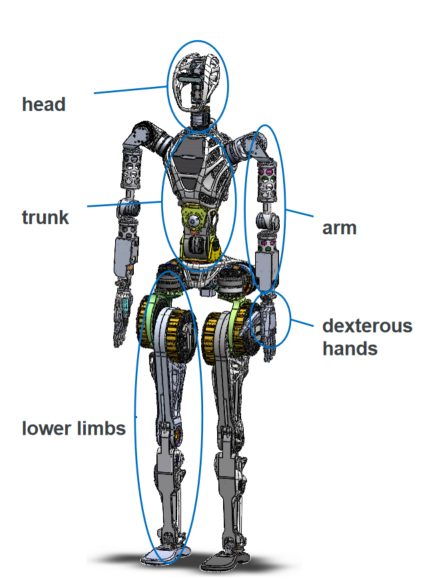
GR-1 mainly consists of five major components: head, torso, arms, dexterous hands, and lower limbs.
Head
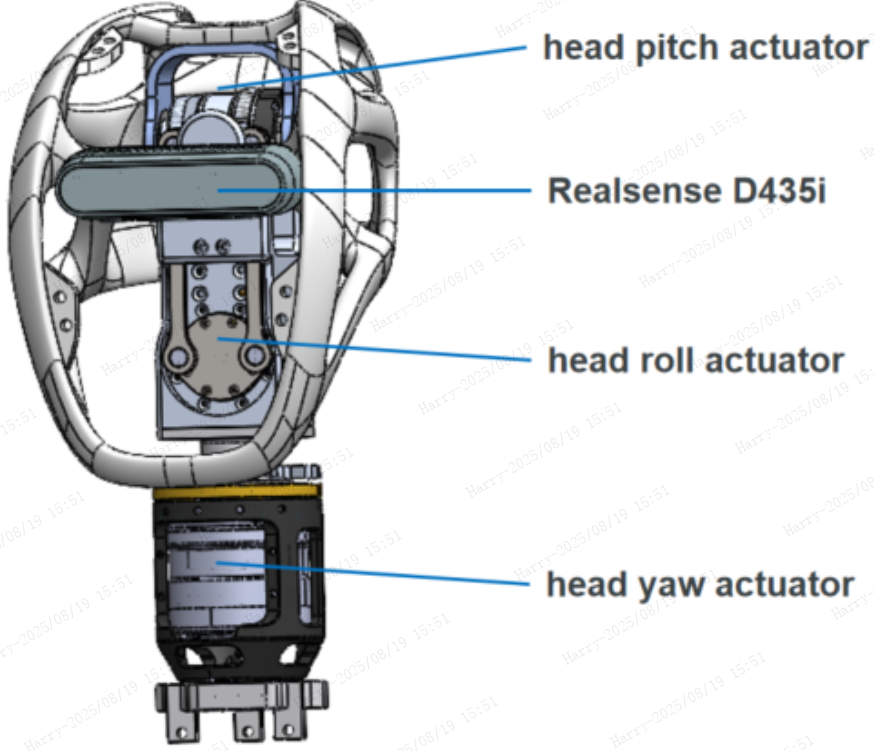
The head is equipped with dual depth cameras providing vision for the robot and can achieve three degrees of freedom of motion (pitch, roll, and yaw).
Torso
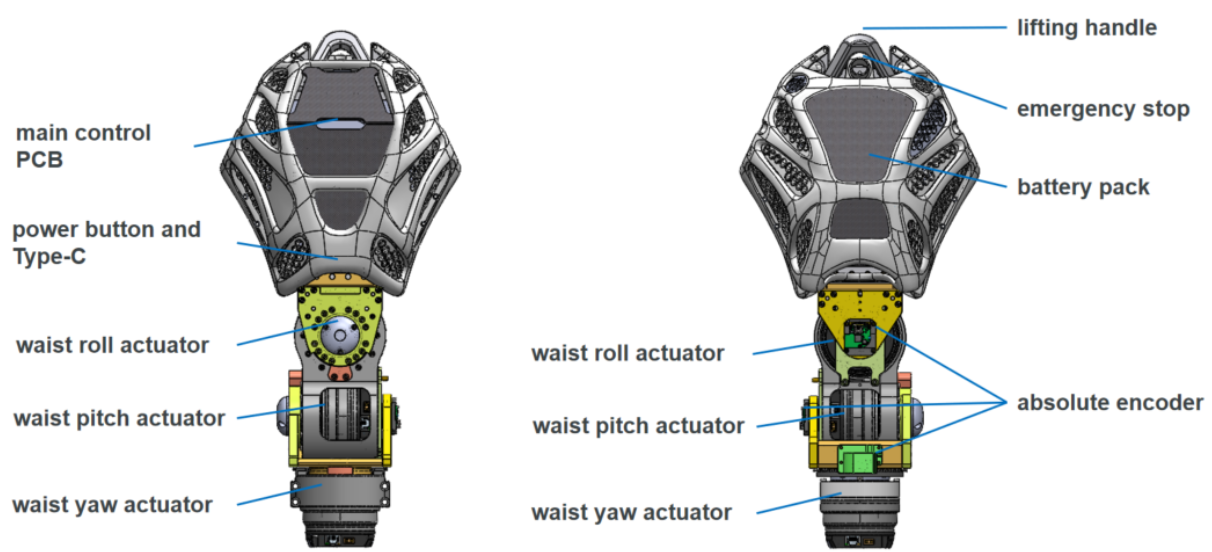
The torso includes the chest, back, and waist. The chest houses the main control board and computing unit, the back contains the battery pack, and the waist can achieve three degrees of freedom of motion (pitch, roll, and yaw)
Arm
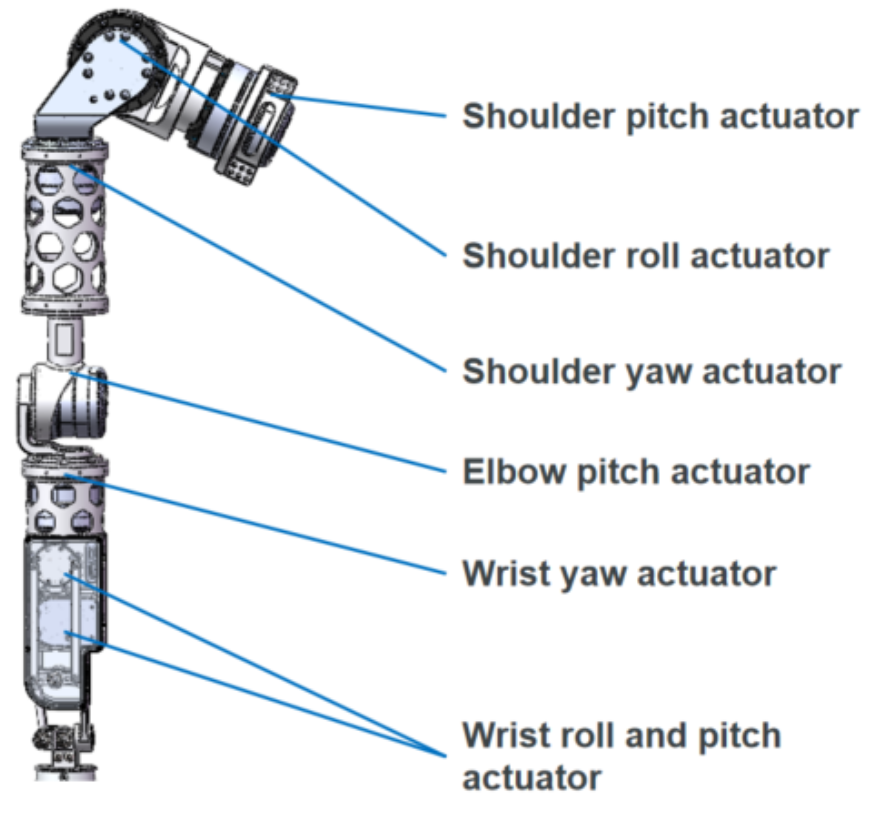
The arm consists of the shoulder joint, elbow joint, and wrist joint. The shoulder joint has three degrees of freedom: flexion/extension, abduction/adduction, and internal/external rotation. The elbow joint has one degree of freedom: flexion/extension. The wrist joint has three degrees of freedom: pronation/supination, radial/ulnar deviation, and flexion/extension. Radial/ulnar deviation and flexion/extension are achieved through a dual-DOF parallel structure.
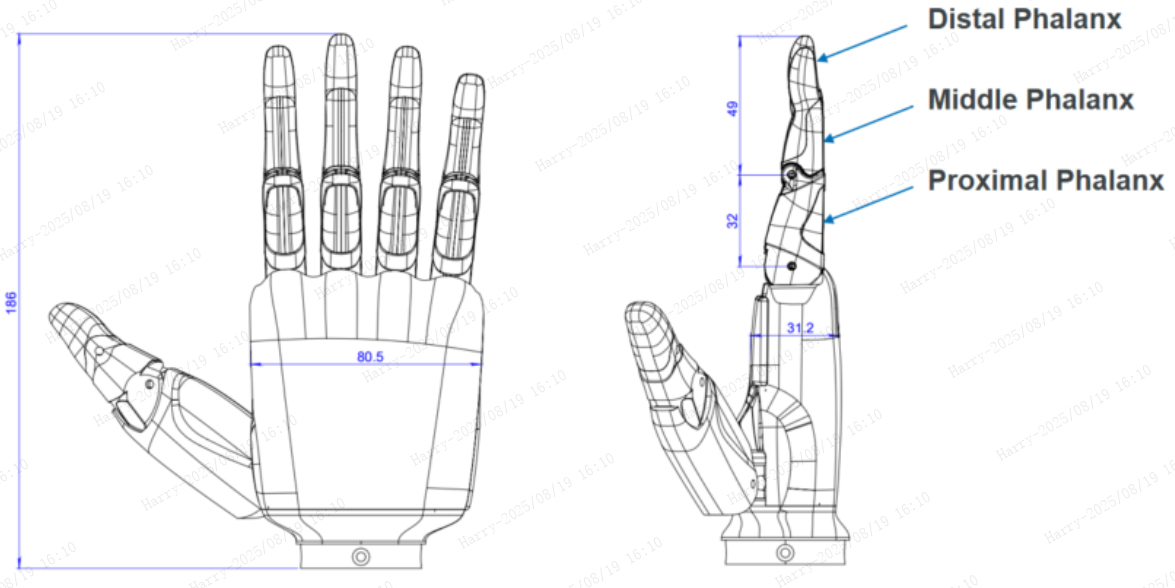
Dexterous Hand
The dexterous hand is a bionic robotic end effector designed to mimic the flexibility and precision of the human hand. It features six degrees of freedom, each representing an independent mode of motion, allowing it to perform a variety of complex manipulation tasks.
The six degrees of freedom include thumb abduction/adduction, thumb rotation, and flexion/extension for the index, middle, ring, and little fingers. The thumb’s dual DOF design allows for opposition and flexible posture adjustment, significantly enhancing grasping and manipulation ability; the independent flexion motion of the other four fingers enables adaptation to objects of different shapes and sizes, effectively improving grasp stability and force control precision.
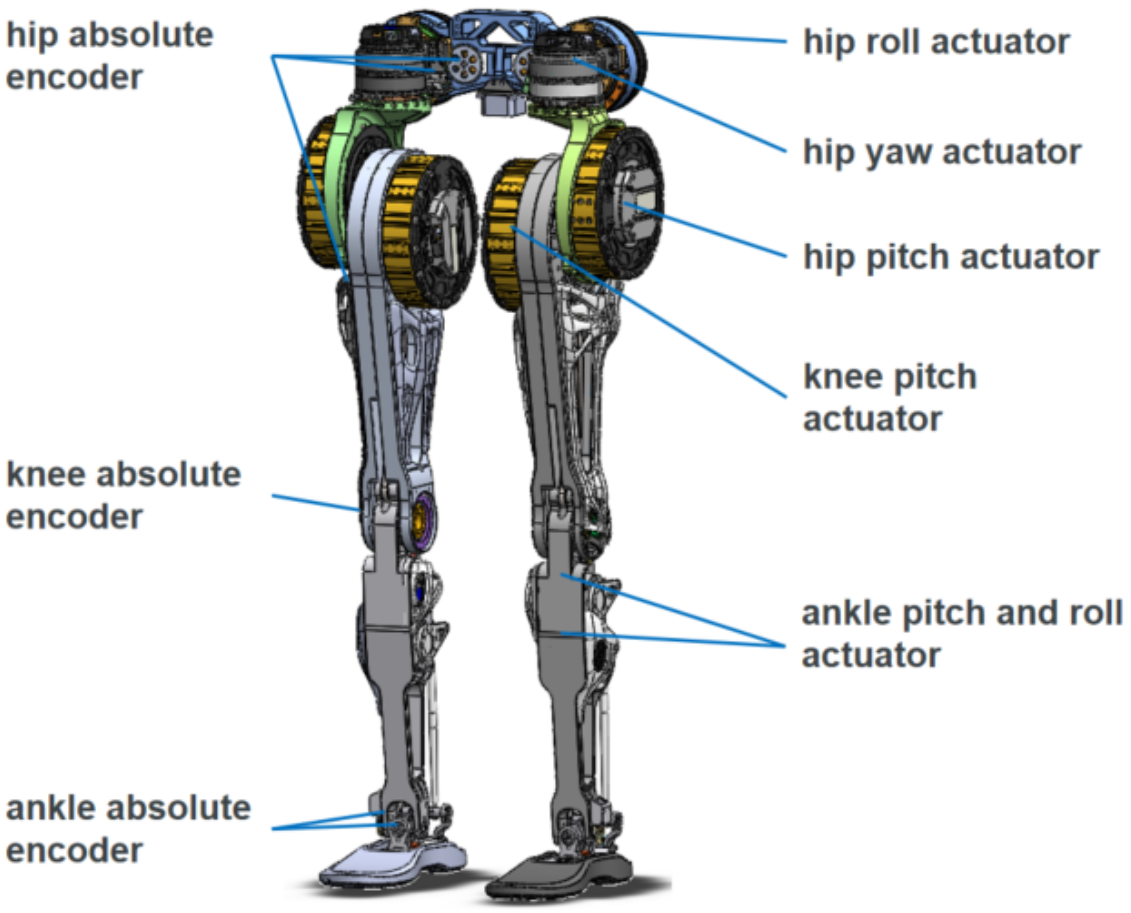
Lower Limbs
The lower limbs consist of hip, knee, and ankle joints. The hip joint has three degrees of freedom: abduction/adduction, internal/external rotation, and flexion/extension. The knee joint has one degree of freedom: flexion/extension. The ankle joint achieves dorsiflexion/plantarflexion and inversion/eversion through a parallel structure.
Electrical System
The electrical system of the GR-1 robot is designed to provide robust communication and power management for all components. The system includes the head, torso, arms, lower limbs, power management module, and switching system. All components are interconnected via an Ethernet bus and powered by a unified 46V central power supply, ensuring smooth operation and precise control required for advanced robotic tasks.
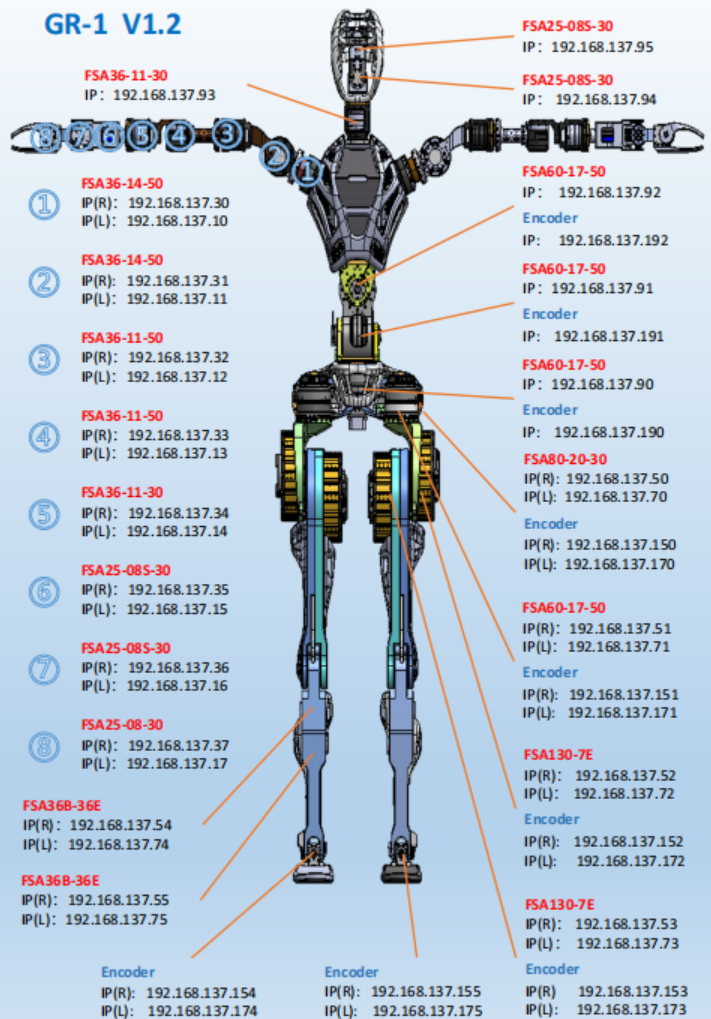
Component IP Configuration
-
Head: The robot neck consists of three actuators connected in series through the Ethernet bus. Power is supplied by the power management module at 46V. The head is equipped with a depth camera that communicates with the main controller via a USB-Type-C data cable.
-
Torso: The GR-1 torso includes one power management module, one switch, and one main motion control unit. All Ethernet communications ultimately converge to the main motion control module on the switch board, which controls all actuators. The torso buttons mainly include a controller button, an emergency stop button, and a power switch button, all connected to the power management module. A 46.2V lithium battery is built into the back of the torso, charged by a dedicated DC charger.
-
Arms: Each arm of GR-1 consists of seven actuators (fourteen in total) and one pair of dexterous hands. Each actuator is connected in series through “Ethernet communication + 46V power.” The arm communicates with the dexterous hand via an Ethernet-to-RS485 conversion.
-
Lower Limbs: The GR-1 waist has three actuators, which are connected in series with the right leg. Each leg consists of six actuators. All actuators are connected in series via 46V power and Ethernet cables. Each active joint of the leg is equipped with an absolute encoder for position detection.
-
Power Management Module: The GR-1 power management module has multiple interfaces, including emergency stop, start/stop, and battery charger interfaces. The lithium battery pack connects to this module. The main control unit (MCU) manages the power supply to the entire actuator system via solid-state relays. The module includes voltage detection and current control functions. It also integrates power interfaces for the motion control module, breathing light control, cooling fan control, and USB serial debugging. The module supports Ethernet communication, allowing connection to the robot’s local network, enabling real-time monitoring via upper computer software.
-
Switching System: The switching module is equipped with eight standard gigabit Ethernet ports. The controller sends motion control commands to each actuator through these interfaces.
Computer Specifications
| Parameter Name | Details |
|---|---|
| Operating System | Ubuntu20.04+ROS 2 |
| Host PC | ASUS 13th Gen Dawn X MINI Commercial Desktop |
| Model | PN64171RZ |
| CPU | I7 13700H |
| RAM | 16G |
| SSD | 512G |
| Wireless Connectivity | Wi-Fi, EEE 80211a/b/g/n/ac; Bluetooth 4.2 |
| External Interfaces | HDMIx1,Type-Cx3(fast charge, download, peripheral expansion) |
Robot Specifications
Mechanical Parameters
| Parameter Name | Details |
|---|---|
| Dimensions | 1650X524X325mm |
| Arm Span | 1764mm |
| Net Weight | ≈52kg |
| Material | Aluminum Alloy+Engineering Plastic |
Electrical Parameters
| Parameter Name | Details |
|---|---|
| Power Supply Voltage | 46.2V |
| Maximum Operating Power | ≈550W |
Performance Parameters
| Parameter Name | Details |
|---|---|
| Walking Speed | 5km/h |
| Single-Hand Payload | ≈3kg |
| Basic Computing Power | i7-13700h 6P+8E 20 threads 1.6/5.0GHz |
Joint Parameters
| Parameter Name | Details |
|---|---|
| Total Number of Actuators | 44/34 |
| FSA Actuator Quantity | 32 |
| Maximum Joint Torque | 230N.m |
| Working Voltage | 12-60V |
| Rated Voltage | 46V |
| Maximum Current | 40A |
| Compliance Standards | GB 17625.1-2012,GB 4943.1-2011,GB/T 9254-2008 |
Sensor Parameters
| Parameter Name | Details |
|---|---|
| Depth Camera | Realsense |
| IMU | Available |
Battery and Power Adapter
| Parameter Name | Details |
|---|---|
| Battery Capacity | 483Wh |
| Battery Type | Lithium-ion Battery |
| Battery Nominal Voltage | 40V |
| Charging Limit Voltage | 46V |
| Rated Capacity | 5.2Ah 112.3Wh |
| Endurance Time | ≈60min |
| Walking Endurance Time | ≈45min |
| Charging Time | 315min |
| Adapter Input | 100-240V-50/60Hz |
| Adapter Output | 46V 2A MAX |