About Dexterous Hand
The Fourier Bionic Five-Finger Dexterous Hand features a humanoid five-finger design with built-in 6 linear actuators and control circuits. It has 6 active degrees of freedom (2 for thumb, 1 for each of the other four fingers) and 5 passive degrees of freedom, totaling 11 movable joints. Through PID control algorithms, it can achieve human-like complex grasping operations at different speeds and force control, while providing standard SDK support for secondary application development.
Product Composition

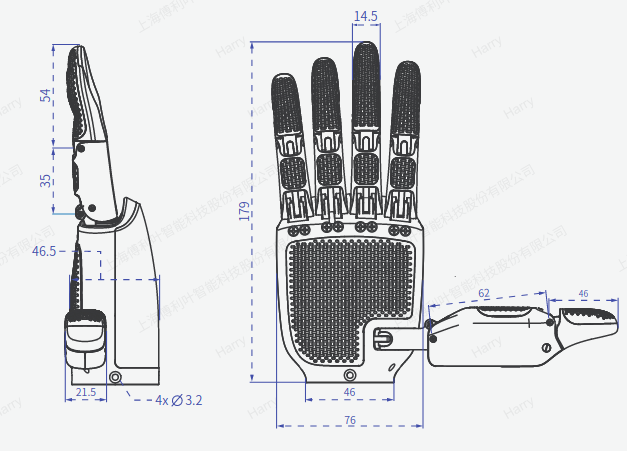
Appearance Dimensions
Joint Introduction
| Joint | Diagram | Range |
|---|---|---|
| Index Finger Middle Finger Ring Finger Little Finger |  | 0° ~ 90° |
| Thumb Flexion |  | 0° ~ 70° |
| Thumb Abduction | 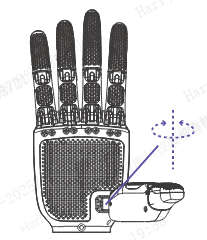 | 0° ~ 100° |
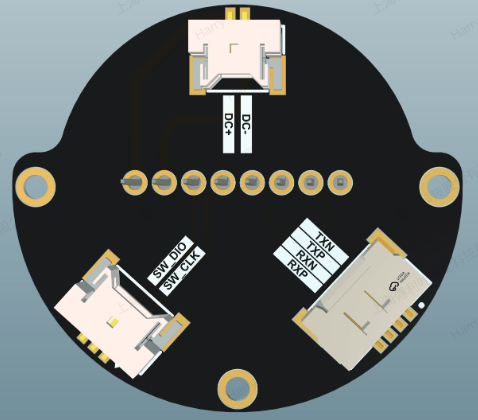
Interface Description
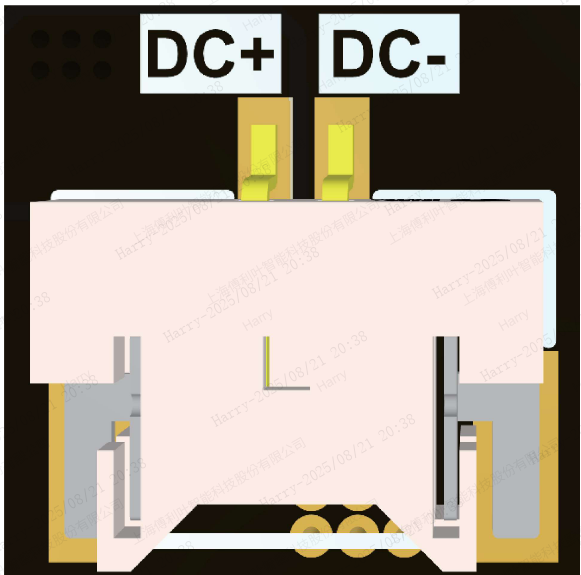
Power Interface
- DC Power Supply: 12V ~ 65V
- Polarity: Left positive, Right negative
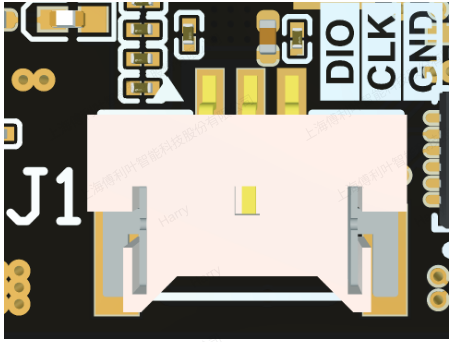
Communication Interface
- 100 Mbps Four-Wire Ethernet
- From left to right: TXN, TXP, RXN, RXP

SWD Debug Interface
- SWD interface is used for standard program download and online debugging.
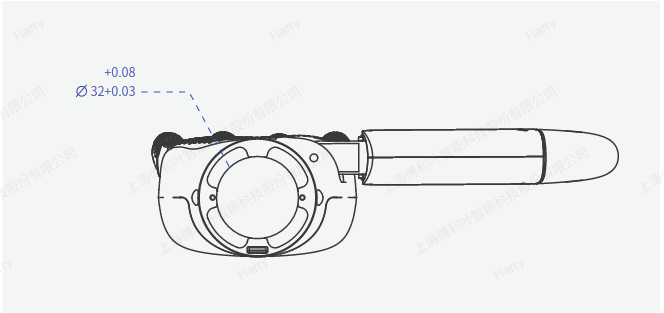
Wrist Adapter Board Interface
- Quick-connect connectors for power interface, 100Mbps four-wire Ethernet, and programming pins.
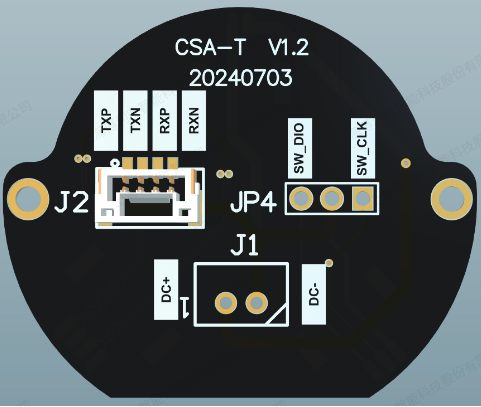
- MX1.25 2P/3P/4P horizontal thin wire-to-board connectors for connecting dexterous hand driver.
Technical Parameters
| Parameter Category | Parameter Name | Parameter Value |
|---|---|---|
| Mechanical Parameters | Dimensions (Hand Length × Palm Width × Palm Thickness) | 179mm × 76mm × 46.5mm |
| Weight | 515g | |
| Total Joints | 11 | |
| Active Degrees of Freedom | 6 | |
| Main Body Material | Metal alloy, silicone, and other materials | |
| Drive Type | Coreless motor | |
| Transmission Method | Linkage | |
| Control Mode | Position, speed control | |
| Electrical Parameters | Supply Voltage | 12V~60V, 46V recommended, 2A |
| Communication Interface | Ethernet | |
| Operating Temperature | Recommended operating temperature: 0℃~40℃ | |
| Performance Parameters | Average Fingertip Force | 6N |
| Maximum Load of Whole Hand | 40kg | |
| Maximum Load per Finger | 10kg | |
| Fingertip Repeated Positioning Accuracy | 0.5mm | |
| Finger Opening and Closing Cycle Time | < 1s |