About GR-3
GR-3 is Fourier's first "Care-bot" humanoid robot specifically designed for interactive companionship, with "approachability", "safety", and "emotional interaction" at its core. GR-3 stands 165cm tall, weighs 71kg, has 55 degrees of freedom covering its entire body, and a single-hand load capacity of up to 3 kilograms, supporting more human-like body expression. Through soft color schemes, flexible cover materials, and moderate height proportions, it creates a relaxed and approachable overall image, visually reducing the mechanical feel and eliminating the coldness of traditional robots. Simultaneously, GR-3 is equipped with Fourier's self-developed full-sense interaction system, integrating three major modules: hearing, vision, and touch, achieving more natural and human-like emotional interaction through collaborative feedback. Every design aspect of GR-3 is dedicated to becoming a social partner that can understand emotions and convey goodwill, using natural interaction methods to build warm human-robot emotional connections and intelligent collaboration in public service spaces.
Product Composition
The Fourier GR-3 General-Purpose Humanoid Robot consists of main components like the head, torso, arms, dexterous hands, waist, and legs. Its whole body is equipped with up to 55 degrees of freedom, supporting more human-like body expression.
- Head: Has 2 degrees of freedom, equipped with a monocular camera for visual perception functions, and also features two eye display screens, ensuring aesthetics while considering practicality and expandability.
- Torso: Integrates core components such as the robot main computer, power management board, communication board, and hot-swappable battery packs, undertaking the system's computation control and energy distribution management functions.
- Arms: A single arm adopts a design including shoulder joint, elbow joint, and wrist joint, possessing 7 degrees of freedom, ensuring a wide range of motion in space and highly flexible operational capability.
- Dexterous Hands: Under standard configuration, equipped with 6-DOF dexterous hands; 12-DOF dexterous hands are optionally available to support high-precision, refined manipulation tasks.
- Waist: Has 3 degrees of freedom, giving the robot more flexible direction adjustment capability during operations.
- Legs: Each leg is equipped with a combination of joints providing 6 degrees of freedom, ensuring the robot maintains a stable posture and achieves flexible movement under complex terrain conditions.
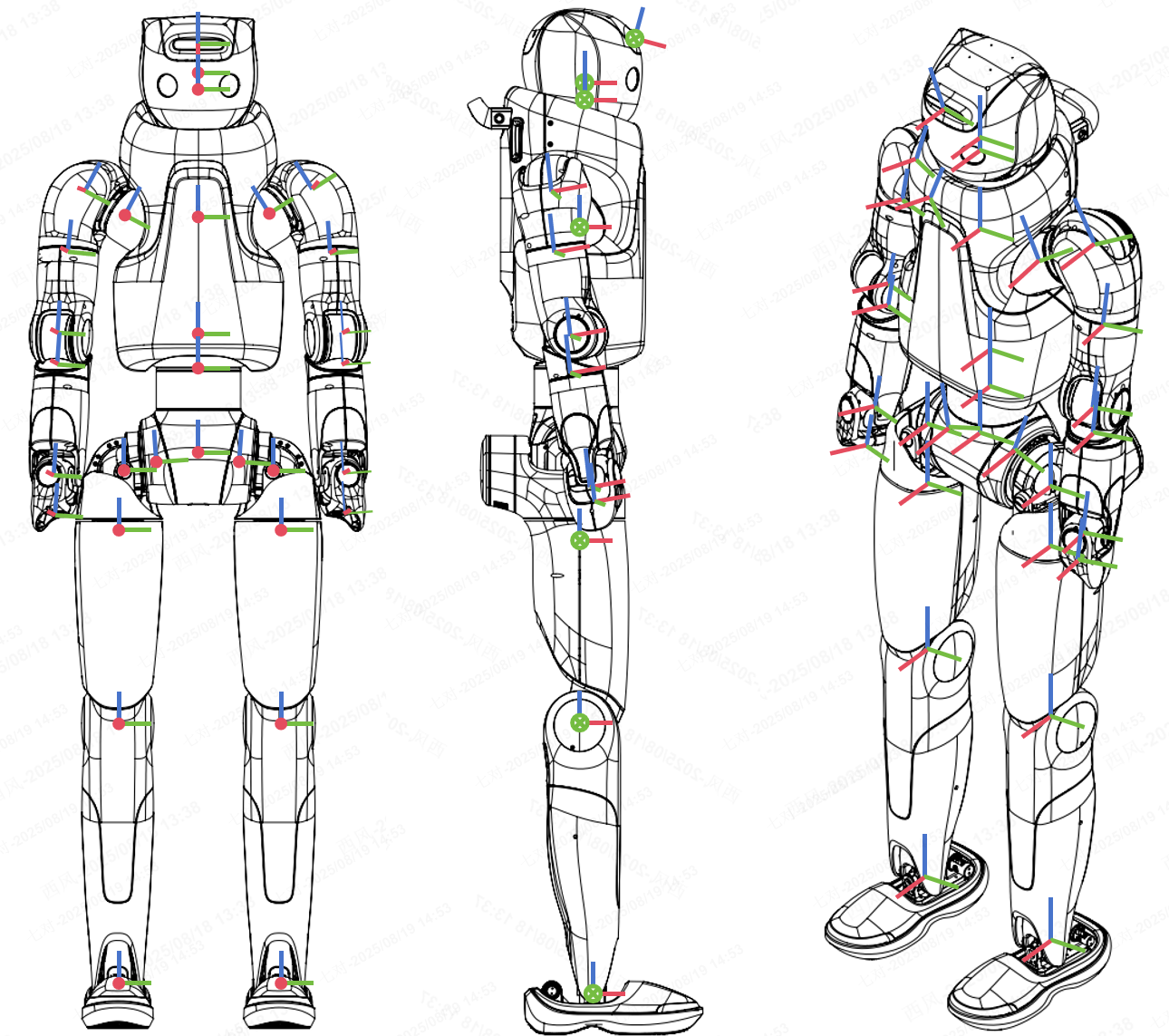
Coordinate System, Joint Rotation Axes, and Joint Zero Points
GR-3's joint rotation coordinate system uses the right-hand coordinate system. The color codes for each axis are as shown in the figure below: X-axis is red, Y-axis is green, Z-axis is blue. The figure also includes information on joint rotation axes and zero point positions. In the coordinate system, the robot's joint rotations can be divided into three basic directions: rotation around the X-axis is called the Roll direction, rotation around the Y-axis is the Pitch direction, and rotation around the Z-axis is called the Yaw direction.
Joint Comparison Diagram and Motion Limits
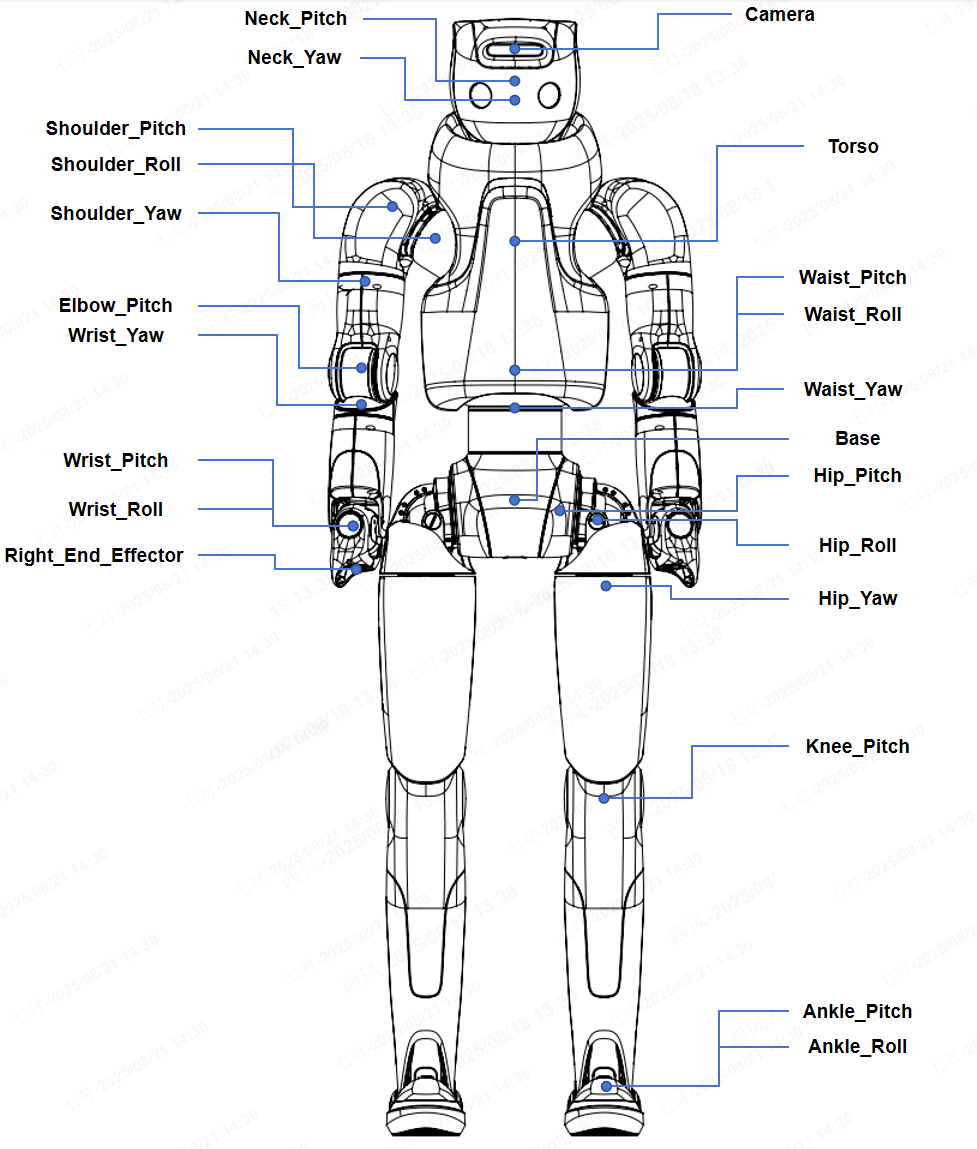
The motion limits for each joint are shown in the table below.
| No. | Joint Name | Control Group Name | Position Upper Limit (rad) | Position Lower Limit (rad) | Velocity Upper Limit (rad/s) | Torque Upper Limit (Nm) |
|---|---|---|---|---|---|---|
| 0 | left_hip_pitch_joint | left_leg | 2.618 | -2.618 | 6.49 | 366.0 |
| 1 | left_hip_roll_joint | left_leg | 1.5708 | -0.17453 | 12.985 | 140.4 |
| 2 | left_hip_yaw_joint | left_leg | 1.5708 | -0.69813 | 12.985 | 140.4 |
| 3 | left_knee_pitch_joint | left_leg | 2.3562 | 0.0 | 6.49 | 366.0 |
| 4 | left_ankle_pitch_joint | left_leg | 0.7854 | -0.7854 | 16.76 | 59.4 |
| 5 | left_ankle_roll_joint | left_leg | 0.43633 | -0.43633 | 16.76 | 59.4 |
| 6 | right_hip_pitch_joint | right_leg | 2.618 | -2.618 | 6.49 | 366.0 |
| 7 | right_hip_roll_joint | right_leg | 0.17453 | -1.5708 | 12.985 | 140.4 |
| 8 | right_hip_yaw_joint | right_leg | 0.69813 | -1.5708 | 12.985 | 140.4 |
| 9 | right_knee_pitch_joint | right_leg | 2.3562 | 0.0 | 6.49 | 366.0 |
| 10 | right_ankle_pitch_joint | right_leg | 0.7854 | -0.7854 | 16.76 | 59.4 |
| 11 | right_ankle_roll_joint | right_leg | 0.43633 | -0.43633 | 16.76 | 59.4 |
| 12 | waist_yaw_joint | waist | 2.618 | -2.618 | 12.985 | 140.4 |
| 13 | waist_roll_joint | waist | 0.17453 | -0.17453 | 14.77 | 108.6 |
| 14 | waist_pitch_joint | waist | 0.5236 | -0.20944 | 14.77 | 108.6 |
| 15 | head_yaw_joint | head | 1.3963 | -1.3963 | 9.21 | 17.4 |
| 16 | head_pitch_joint | head | 0.5236 | -0.5236 | 9.21 | 17.4 |
| 17 | left_shoulder_pitch_joint | left_manipulator | 2.9671 | -2.9671 | 7.75 | 74.4 |
| 18 | left_shoulder_roll_joint | left_manipulator | 1.9199 | -0.2618 | 7.75 | 74.4 |
| 19 | left_shoulder_yaw_joint | left_manipulator | 1.8326 | -1.8326 | 6.28 | 42.9 |
| 20 | left_elbow_pitch_joint | left_manipulator | 0.087266 | -2.2689 | 6.28 | 42.9 |
| 21 | left_wrist_yaw_joint | left_manipulator | 1.8326 | -1.8326 | 6.28 | 42.9 |
| 22 | left_wrist_pitch_joint | left_manipulator | 1.309 | -0.87266 | 9.2153 | 17.4 |
| 23 | left_wrist_roll_joint | left_manipulator | 1.2217 | -1.0472 | 9.2153 | 17.4 |
| 24 | right_shoulder_pitch_joint | right_manipulator | 2.9671 | -2.9671 | 7.75 | 74.4 |
| 25 | right_shoulder_roll_joint | right_manipulator | 0.2618 | -1.9199 | 7.75 | 74.4 |
| 26 | right_shoulder_yaw_joint | right_manipulator | 1.8326 | -1.8326 | 6.28 | 42.9 |
| 27 | right_elbow_pitch_joint | right_manipulator | 0.087266 | -2.2689 | 6.28 | 42.9 |
| 28 | right_wrist_yaw_joint | right_manipulator | 1.8326 | -1.8326 | 6.28 | 42.9 |
| 29 | right_wrist_pitch_joint | right_manipulator | 1.309 | -0.87266 | 9.2153 | 17.4 |
| 30 | right_wrist_roll_joint | right_manipulator | 1.0472 | -1.2217 | 9.2153 | 17.4 |
Electrical Interfaces

| No. | Interface Name | Description |
|---|---|---|
| 1 | Battery Group Power Switch | Used to power on and power off the battery group. |
| 2 | Power Level Indicator | Visually displays the current power level and charging progress of the battery group, indicating whether the battery group needs charging, is currently charging, or has finished charging. |
| 3 | Emergency Stop Button | Pressing the emergency stop button immediately powers down the actuator, stopping its operation; rotating the emergency stop cap clockwise resets the button, deactivates the emergency stop, powers up the actuator, and resumes normal operation. |
| 4 | Charging Port | Align and insert the charger plug with the red dot to charge the battery group. |
| 5 | System Power Button | Press and hold the "System Power Button", release the button after the "Green Light" flashes. When the green light stays steadily on, the system boot is complete. |
| 6 | External Power Supply Port | 1. Provides output voltage/current: 19V/3A. The red mark on the interface indicates the positive pole. 2. Connector Model: 02.FGG.0B.002.CA42ZN. |
| 7 | External Emergency Stop Interface | Connect the "External Emergency Stop Device". Pressing the emergency stop button on the external device immediately powers down the actuator; rotating the emergency stop cap clockwise resets the button, deactivates the emergency stop, powers up the actuator, and resumes normal operation. |
| 8 | Type-C Interface | The NUC controller's Type-C interface can be used to connect a docking station module to expand USB and HDMI peripherals for the NUC controller. Note: The docking station must be connected before the system is powered on. |
| 9 | Ethernet Interface | Gigabit Ethernet interface for communication with the entire system. |
Core Parameters Table
| Parameter Category | Parameter Name | Parameter Details |
|---|---|---|
| Mechanical Parameters | Dimensions | 1642mm x 552mm x 292mm |
| Arm Span | 1395mm | |
| Arm Span + Self-developed Dexterous Hand | Up to 1759mm (12-DOF Dexterous Hand version) | |
| Calf + Thigh Length | 425mm + 408mm | |
| Net Weight | ≈71 kg | |
| Material | Aluminum Alloy + Engineering Plastic + Soft Cover Material | |
| Electrical Parameters | Nominal Voltage | 46.8V |
| Rated Power | ≈936W | |
| Performance Parameters | Walking Speed | 6.1km/h |
| Single Hand Load Capacity | ≈3kg | |
| Base Compute | 8-core 16-thread high-performance CPU | |
| Total Actuator Count | Up to 55 | |
| Max Joint Peak Torque | 440N·m | |
| Head DOF | 2 | |
| Single Leg DOF | 6 | |
| Waist DOF | 3 | |
| Single Arm DOF | 7 | |
| Single Hand Basic DOF | 6 | |
| Single Hand High DOF | Optional 12-DOF Dexterous Hand | |
| Feet DOF | Supports absolute encoders | |
| Communication Method | Ethernet | |
| Battery Parameters | Battery Capacity | 702Wh + 234Wh |
| Battery Type | Lithium-ion battery | |
| Total Weight | 3.8kg + 1.3kg | |
| Battery Nominal Voltage | 46.8V | |
| Charge Limit Voltage | 54.6V | |
| Cycle Life | ≥500 (80%DOD) | |
| Endurance Time | ≈3h | |
| Charging Time | ≈1.5h | |
| Hot Swap | Supports hot-swappable battery replacement | |
| Charger Input Parameters | Input Voltage Range: 90VAC~260VAC, 50HZ/60HZ | |
| Charger Output Parameters | Output Voltage/Current: 54.6V, 12A MAX | |
| Central Processing Unit | Operating System | Ubuntu 22.04 |
| Processor | AMD Ryzen 7 8845HS | |
| I/O | Type-C, USB3.0, RJ45 | |
| Interaction Capability | Teleoperation | Supports remote immersive control (Pico/VisionPro/Quest) |
| Voice Interaction | Supports echo cancellation, sound source localization, voice interaction, voice dialogue | |
| Perception Sensor Configuration | Camera | Monocular camera |
| IMU | 6-axis, supports acceleration and angular velocity detection | |
| Microphone | Can achieve 360-degree omnidirectional sound pickup | |
| Speaker | Maximum support 15W, volume adjustable | |
| Touch | Supports |