About GR-2
Fourier's GR-2 General-Purpose Humanoid Robot stands 1.75 meters tall, weighs 63 kilograms, and has up to 53 Degrees of Freedom covering its entire body. It is equipped with the new FSA 2.0 Actuator and fully self-developed Dexterous Hands, supporting more flexible upper limb manipulation, a more powerful dynamic system, and a more open development platform. It has currently achieved experimental applications in fields such as guidance and consultation, academic research, industrial manufacturing, and medical rehabilitation.
Product Composition
-
Overall Structure: The GR-2 General-Purpose Humanoid Robot consists of main components like the head, torso, arms, dexterous hands, waist, and legs. Its whole body possesses up to 53 Degrees of Freedom, enabling it to perform complex action sequences.
-
Head: Equipped with 2 Degrees of Freedom (head rotation joint and head pitch joint), integrating visual perception modules, voice interaction modules, and speaker components, etc., providing the robot with basic environmental perception and human-computer interaction capabilities.
-
Torso: The torso integrates the Robot Main Computer and the Power Management Module, undertaking the core functions of system computation control and energy distribution management.
-
Arms: A single arm design includes the shoulder joint, elbow joint, and wrist joint, providing 7 Degrees of Freedom, ensuring a wide range of motion in space and highly flexible operational capability.
-
Dexterous Hands: Under standard configuration, each hand has 6 Degrees of Freedom; An enhanced version with 12 Degrees of Freedom is optionally available to support high-precision, refined manipulation tasks.
-
Waist: Features a rotational joint with 1 Degree of Freedom, supporting the robot's overall horizontal turning movement, enhancing its ability to adjust direction during operations.
-
Legs: Each leg is equipped with a combination of joints providing 6 Degrees of Freedom, ensuring the robot maintains a stable posture and achieves flexible movement under complex terrain conditions.
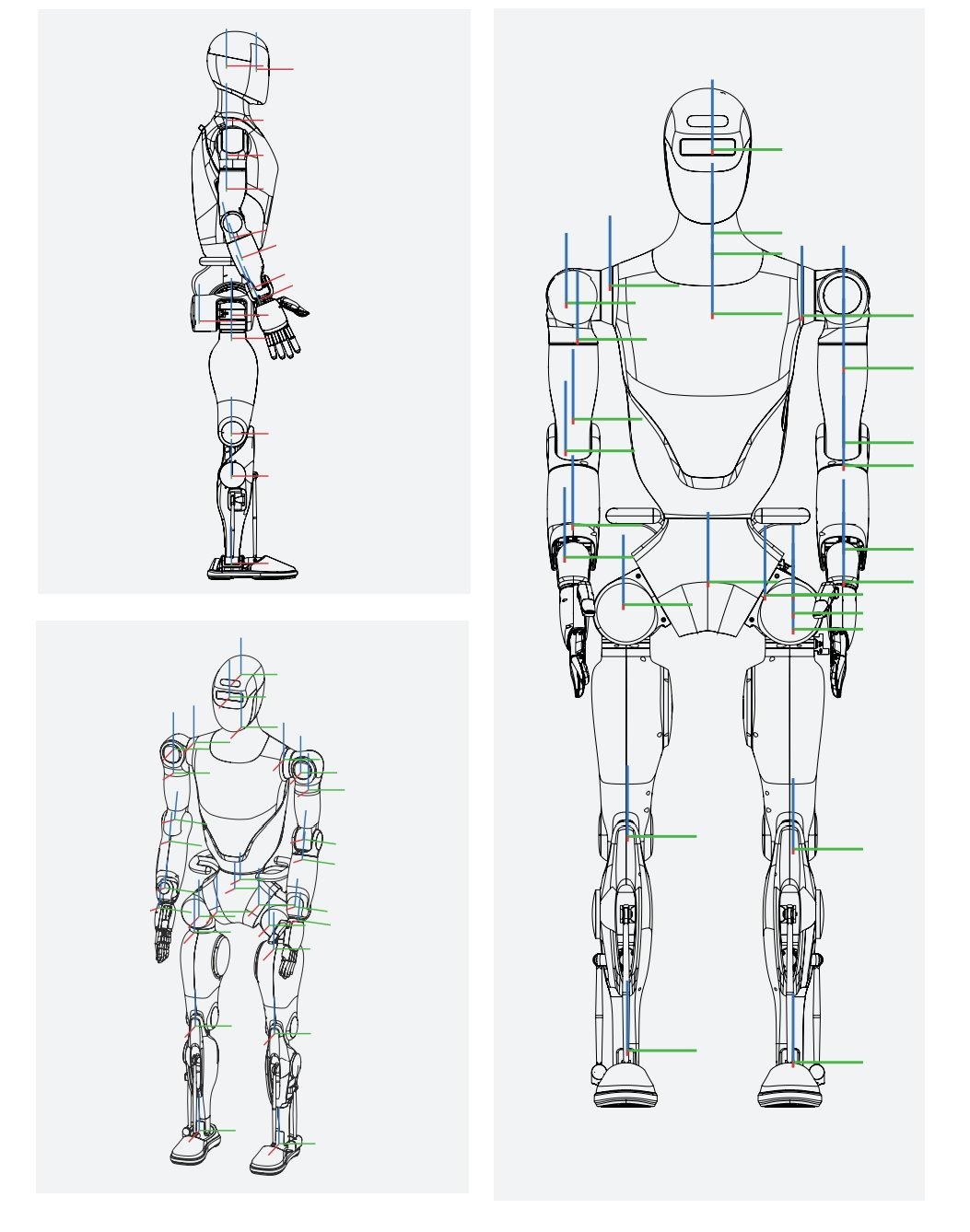
Coordinate System, Joint Rotation Axes, and Joint Zero Points
GR-2's joint rotation coordinate system uses the right-hand coordinate system. The color codes for each axis are as shown in the figure below: X-axis is red, Y-axis is green, Z-axis is blue. The figure also includes information on joint rotation axes and zero point positions.
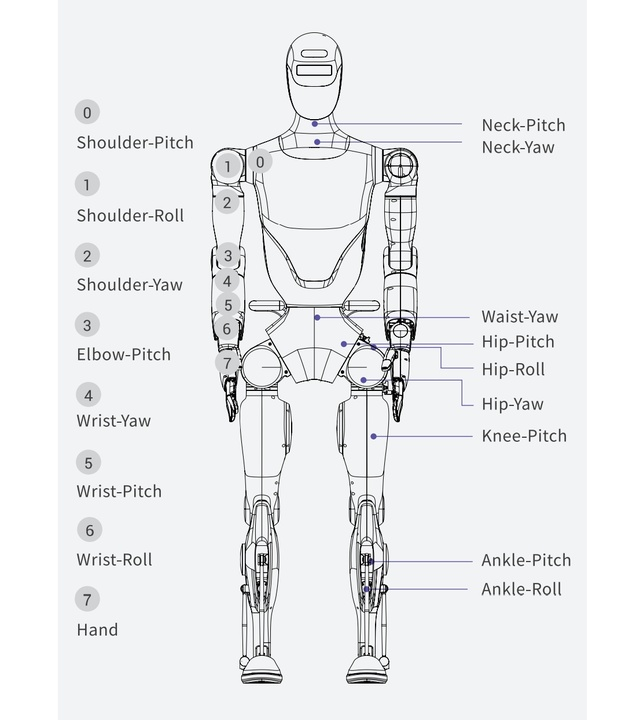
Joint Comparison Diagram and Joint Limits
The joint comparison diagram is shown below:
| No. | Joint Name | Control Group Name | Position Upper Limit (rad) | Position Lower Limit (rad) | Velocity Upper Limit (rad/s) | Torque Upper Limit (Nm) |
|---|---|---|---|---|---|---|
| 0 | left_hip_pitch_joint | left_leg | 2.618 | -2.618 | 6.4997 | 366.05 |
| 1 | left_hip_roll_joint | left_leg | 1.5708 | -0.59341 | 12.362 | 95.472 |
| 2 | left_hip_yaw_joint | left_leg | 1.5708 | -0.69813 | 14.745 | 54.33 |
| 3 | left_knee_pitch_joint | left_leg | 2.3562 | -0.087266 | 6.4997 | 366.05 |
| 4 | left_ankle_pitch_joint | left_leg | 0.7854 | -0.7854 | 14.745 | 54.33 |
| 5 | left_ankle_roll_joint | left_leg | 0.38397 | -0.38397 | 16.755 | 29.835 |
| 6 | right_hip_pitch_joint | right_leg | 2.618 | -2.618 | 6.4997 | 366.05 |
| 7 | right_hip_roll_joint | right_leg | 0.59341 | -1.5708 | 12.362 | 95.472 |
| 8 | right_hip_yaw_joint | right_leg | 0.69813 | -1.5708 | 14.745 | 54.33 |
| 9 | right_knee_pitch_joint | right_leg | 2.3562 | -0.087266 | 6.4997 | 366.05 |
| 10 | right_ankle_pitch_joint | right_leg | 0.7854 | -0.7854 | 14.745 | 54.33 |
| 11 | right_ankle_roll_joint | right_leg | 0.38397 | -0.38397 | 16.755 | 29.835 |
| 12 | waist_yaw_joint | waist | 2.618 | -2.618 | 7.7568 | 74.45 |
| 13 | head_yaw_joint | head | 1.3963 | -1.3963 | 9.1627 | 17.325 |
| 14 | head_pitch_joint | head | 0.5236 | -0.5236 | 9.1627 | 17.325 |
| 15 | left_shoulder_pitch_joint | left_manipulator | 2.9671 | -2.9671 | 7.7568 | 74.45 |
| 16 | left_shoulder_roll_joint | left_manipulator | 2.7925 | -0.5236 | 7.7568 | 74.45 |
| 17 | left_shoulder_yaw_joint | left_manipulator | 1.8326 | -1.8326 | 6.283 | 42.75 |
| 18 | left_elbow_pitch_joint | left_manipulator | 0.47997 | -1.5272 | 6.283 | 42.75 |
| 19 | left_wrist_yaw_joint | left_manipulator | 1.8326 | -1.8326 | 9.1627 | 17.325 |
| 20 | left_wrist_pitch_joint | left_manipulator | 0.61087 | -0.61087 | 9.1627 | 17.325 |
| 21 | left_wrist_roll_joint | left_manipulator | 0.95993 | -0.95993 | 9.1627 | 17.325 |
| 22 | right_shoulder_pitch_joint | right_manipulator | 2.9671 | -2.9671 | 7.7568 | 74.45 |
| 23 | right_shoulder_roll_joint | right_manipulator | 0.5236 | -2.7925 | 7.7568 | 74.45 |
| 24 | right_shoulder_yaw_joint | right_manipulator | 1.8326 | -1.8326 | 6.283 | 42.75 |
| 25 | right_elbow_pitch_joint | right_manipulator | 0.47997 | -1.5272 | 6.283 | 42.75 |
| 26 | right_wrist_yaw_joint | right_manipulator | 1.8326 | -1.8326 | 9.1627 | 17.325 |
| 27 | right_wrist_pitch_joint | right_manipulator | 0.61087 | -0.61087 | 9.1627 | 17.325 |
| 28 | right_wrist_roll_joint | right_manipulator | 0.95993 | -0.95993 | 9.1627 | 17.325 |
Electrical Interfaces
The GR-2 robot has a total of seven external device interfaces. Four are located in the interface slots below the back battery, two are in the groove above the emergency stop button, and one is on the front waist (requires opening the cover). Specific locations are shown in the figure.


| No. | Interface Name | Description |
|---|---|---|
| 1 | System Power Button | Used for system power on/off and status display |
| 2 | USB Type-C Port | The NUC controller's USB Type-C port can connect to a dock to expand USB and HDMI peripherals Note: The dock must be connected before powering on |
| 3 | Ethernet Port (100M) | 100 Mbps Ethernet port for communication with the whole system |
| 4 | Charging Port | Used for charging the device |
| 5 | External Power Supply Port | 1. Provides 16V DC / 6A output, red port is positive 2. Connector model: FGG.0B |
| 6 | Ethernet Port (Gigabit) | Gigabit Ethernet port for communication with the whole system Note: The dock must be connected before powering on |
| 7 | USB 3.0 Port | 1. NUC controller's USB 3.0 port 2. Usage: Use a tool to open the cover plate to access the port 3. When not in use: It is recommended to reset the cover plate to protect the port from dust or external damage |
Computer Performance
| Type | Motion Control Module | Perception Module |
|---|---|---|
| Processor | Intel® Core™ i7 (14 cores) | 4 × Cortex-A76 + 4 × Cortex-A55, ARM Mali-G610 MC4 |
| Architecture | 14 Cores / 18 Threads, Max 4.5 GHz | 8 Cores (4 × A76 + 4 × A55), Max 2.4 GHz, AI Perf: 6 TOPS |
| Memory | 16 GB | 8 GB |
| Storage | 512 GB | 64 GB |
| Wired Network | Gigabit Ethernet (1 × 1000 Mbps) | Gigabit Ethernet (1 × 1000 Mbps) |
| Wireless Network | Wi-Fi 6 | Wi-Fi 6 |
| Audio | Microphone |
Robot Core Parameters Table
| Parameter Category | Parameter Name | Parameter Details |
|---|---|---|
| Mechanical Parameters | Dimensions | 1750 mm × 552 mm × 275 mm |
| Arm Span | 1520 mm | |
| Arm Span + Self-developed Dexterous Hand | Up to 1920 mm (12-DOF Dexterous Hand version) | |
| Calf + Thigh Length | 465 mm + 378 mm | |
| Net Weight | ≈63 kg | |
| Material | Aluminum Alloy + Engineering Plastic | |
| Joint Parameters | Total Actuator Count | Up to 53 (12-DOF Dexterous Hand version, optional) |
| Single Leg DOF | 6 | |
| Single Arm DOF | 7 | |
| Waist DOF | 1 | |
| Head DOF | 2 | |
| Single Hand Basic DOF | 6 | |
| Single Hand High DOF | Optional 12-DOF Dexterous Hand | |
| Max Joint Peak Torque | 436 N·m | |
| Dual Encoder | 23 bit/23 bit (Lower limbs), 24 bit/24 bit (Upper limbs) | |
| Performance Parameters | Walking Speed | 5 km/h |
| Single Hand Load Capacity | ≈3 kg | |
| Base Compute | 14-core High-performance CPU | |
| Battery Parameters | Battery Type | Lithium-ion battery |
| Battery Capacity | ≈950 Wh | |
| Endurance Time | ≈2 h | |
| Charging Time | ≈2 h | |
| Total Weight | ≤9 kg | |
| Battery Nominal Voltage | 39.6 V | |
| Charge Limit Voltage | 46.2 V | |
| Cycle Life | ≥500 cycles (80% DOD) | |
| Sensors | Camera | Binocular camera |
| IMU | 6-axis, supports acceleration and angular velocity detection | |
| Safety Functions | Wireless Emergency Stop | 1 |
| Local Emergency Stop | 1 | |
| Communication Interfaces | Wired Connection | Ethernet |
| Wireless Connection | Wi-Fi 6 | |
| Environmental Conditions | Operating Temperature | 0°C to 45°C |
| Operating Humidity | 20% to 80% RH (No condensation) |