About Fourier N1
The Fourier Nexus-01 General-purpose Humanoid Robot (Nexus-01 hereinafter referred to as N1) stands 1.3 meters tall and weighs 38 kg, combining flexibility and dynamic stability. With 23 degrees of freedom(DOFs) across its body, N1 enables complex locomotion control and multi-scenario adaptability. The measured maximum stable running speed can reach 3.5m/s, with excellent dynamic balance performance. N1 can walk and run stably, and adapt to climbing on a 15°~20° slope and 20cm high stairs. It can also perform challenging actions such as stair walking without visual assistance, single-leg standing, and crawling up with both hands on the ground.
Product Composition
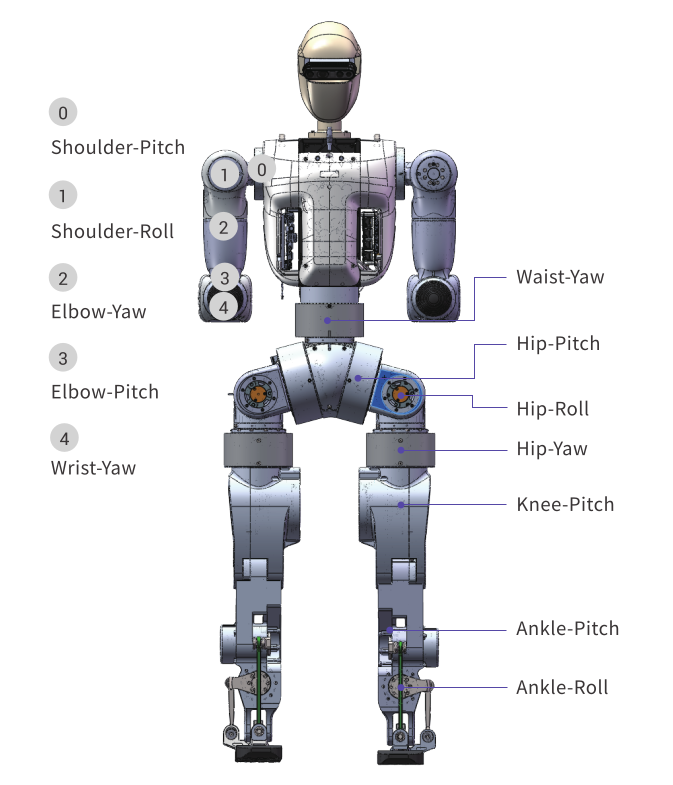
N1 consists of major components including the head, torso, arms, waist, and legs. With 23 DOFs across its body, it enables complex locomotion sequences.
- Head: The head has no DOF but supports flexible expansion, allowing for the autonomous installation of vision sensors (such as stereo camera) to meet diverse perception needs.
- Torso: The torso integrates core components including the main host, power management module, and network switch, serving as the central hub for system computation control and resource distribution management.
- Arm: Each arm features 5 DOFs, including the shoulder joint, elbow joint, etc. This ensures a wide range of locomotion and high operational flexibility.
- Waist: The waist has 1 DOF to support overall horizontal torso rotation, enhancing its ability to adjust direction.
- Legs: Each leg has 6 DOFs, ensuring balance and mobility across complex terrains.
Joint Reference Diagram and Motion Limits
The Fourier N1 has a total of 23 joints throughout its body, including 5 joints for the left arm and right arm respectively, 1 for the waist, and 6 for each of the left and right legs. The position reference diagram and the limit table for each joint are as follows:
| No. | Joint Name | Control Group Name | Position Upper Limit (rad) | Position Lower Limit (rad) | Velocity Upper Limit (rad/s) | Torque Upper Limit (Nm) |
|---|---|---|---|---|---|---|
| 1 | left_hip_pitch_joint | left_leg | 2.617 | -2.617 | 16.2 | 90 |
| 2 | left_hip_roll_joint | left_leg | 1.57 | -0.261 | 14.738 | 54 |
| 3 | left_hip_yaw_joint | left_leg | 2.617 | -2.617 | 14.738 | 54 |
| 4 | left_knee_pitch_joint | left_leg | 2.356 | -0.0872 | 16.2 | 90 |
| 5 | left_ankle_roll_joint | left_leg | 0.436 | -0.436 | 16.747 | 30 |
| 6 | left_ankle_pitch_joint | left_leg | 0.436 | -0.436 | 16.747 | 30 |
| 7 | right_hip_pitch_joint | right_leg | 2.617 | -2.617 | 16.2 | 90 |
| 8 | right_hip_roll_joint | right_leg | 0.261 | -1.57 | 14.738 | 54 |
| 9 | right_hip_yaw_joint | right_leg | 2.617 | -2.617 | 14.738 | 54 |
| 10 | right_knee_pitch_joint | right_leg | 2.356 | -0.0872 | 16.2 | 90 |
| 11 | right_ankle_roll_joint | right_leg | 0.436 | -0.436 | 16.747 | 30 |
| 12 | right_ankle_pitch_joint | right_leg | 0.436 | -0.436 | 16.747 | 30 |
| 13 | waist_yaw_joint | waist | 2.617 | -2.617 | 14.738 | 54 |
| 14 | left_shoulder_pitch_joint | left_manipulator | 2.966 | -2.966 | 14.738 | 54 |
| 15 | left_shoulder_roll_joint | left_manipulator | 2.792 | -0.174 | 16.747 | 30 |
| 16 | left_shoulder_yaw_joint | left_manipulator | 1.832 | -1.832 | 16.747 | 30 |
| 17 | left_elbow_pitch_joint | left_manipulator | 1.658 | -0.349 | 16.747 | 30 |
| 18 | left_wrist_yaw_joint | left_manipulator | 1.832 | -1.832 | 16.747 | 30 |
| 19 | right_shoulder_pitch_joint | right_manipulator | 2.966 | -2.966 | 14.738 | 54 |
| 20 | right_shoulder_roll_joint | right_manipulator | 0.174 | -2.792 | 16.747 | 30 |
| 21 | right_shoulder_yaw_joint | right_manipulator | 1.832 | -1.832 | 16.747 | 30 |
| 22 | right_elbow_pitch_joint | right_manipulator | 1.658 | -0.349 | 16.747 | 30 |
| 23 | right_wrist_yaw_joint | right_manipulator | 1.832 | -1.832 | 16.747 | 30 |
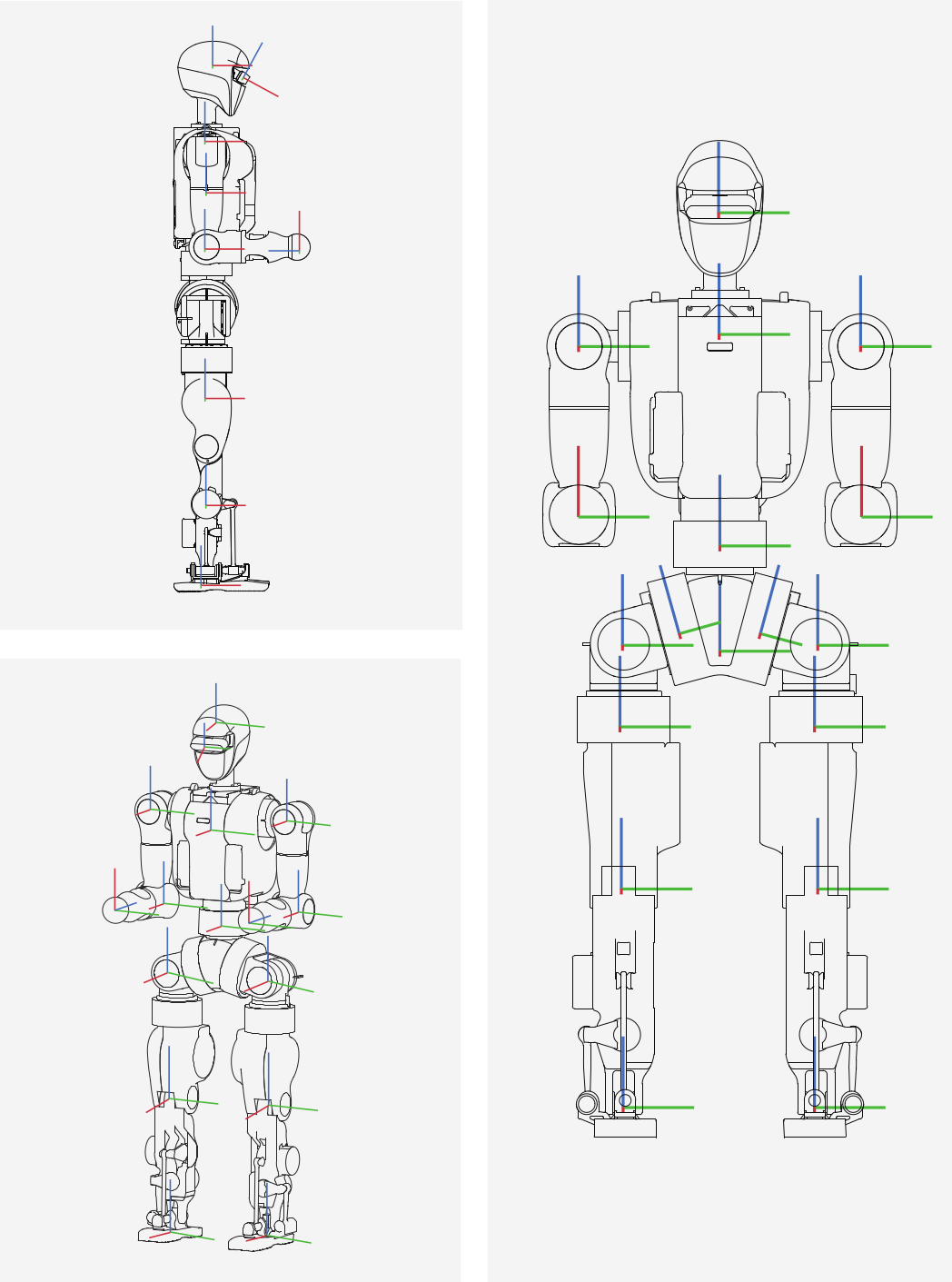
Coordinate System, Joint Rotation Axes, and Joint Zero Points
The joint rotation coordinate system of the Fourier N1 adopts a right-handed coordinate system. The axis color coding is as shown in the figure below: the X-axis is red, the Y-axis is green, and the Z-axis is blue. The figure also includes information about the joint rotation axes and zero-point positions. In the coordinate system, the robot's joint rotations can be divided into three basic directions: rotation around the X-axis is called the Roll direction, rotation around the Y-axis is called the Pitch direction, and rotation around the Z-axis is called the Yaw direction.
Electrical Interfaces

| No. | Interface Name | Description |
|---|---|---|
| 1 | Battery Button | Used for battery power on/off and status display |
| 2 | System Power Button | Used for system power on/off and status display |
| 3 | Charging Interface | Used for charging the device |
Core Parameters Table
| Parameter Category | Parameter Name | Parameter Details |
|---|---|---|
| Mechanical Parameters | Dimensions | 1245 mm × 441 mm × 202 mm |
| Arm Span | 1240 mm | |
| Weight | ≈39 kg | |
| Material | Aluminum Alloy - engineering plastics | |
| Electrical Parameters | Rated Voltage | 39.6V |
| Rated Power | ≈460W | |
| Performance Indicators | Walking Speed | 2.7 km/h |
| Running Speed | 10.8 km/h | |
| Basic Computing Unit | 8-core high-performance CPU | |
| Joint Information | Total DOFs | 23 |
| Peak Joint Torque | 144 N·m | |
| Operating Voltage | 24-60V | |
| Rated Voltage | 46V | |
| Dual Encoders | 16bit/14bit | |
| Communication Method | Ethernet | |
| Battery & Adapter | Type | Lithium-ion Battery |
| Capacity | 475WH | |
| Total Weight | ≤3.2kg | |
| Nominal Voltage | 39.6V | |
| Charging Limit Voltage | 46.2V | |
| Cycle Life | 25℃, 10A discharge, ≥800 cycles, SOH 80% | |
| Battery Life | ≈2h | |
| Charging Time | ≈3.5h | |
| Adapter Input | 100-240V-50/60Hz | |
| Adapter Output | 46V 4A | |
| CPU | Operating System | Ubuntu 22.04 |
| Processing Unit | Intel® Core™ i7-13700H | |
| Computing Power | 8-core high-performance CPU | |
| Memory | 16 GB | |
| Storage | 512GB NVMe | |
| I/O | HDMI/Type-C/Type-A | |
| Wired Network | 100M/1000M/2500M | |
| Wireless Network | Wi-Fi 6 | |
| Sensor Parameters | Camera | Stereo camera (Optional) |
| IMU | 6-axis, supports acceleration and angular velocity detection |